差速两轮车里程计模型基础讲解
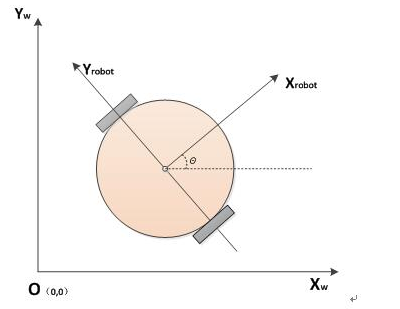
二轮差动模型的机器人底盘,是最常见的机器人底盘,像扫地机器人,循迹小车等。作为机器人的移动部件,它需要实现输入输出两大功能。 输入:接收控制指令速度V和角速度W(v,w)--单位m/s rad/s 输出:机器人...

正态分布在占用栅格地图构建的使用
本章介绍如何使用正态分布的概率完成mapping 正态分布的参数定义 正态分布表达式中有两个参数,即期望(均数)μ和标准差σ,σ2为方差。 正态分布具有两个参数μ和σ^2的连续型...
occupancy grid mapping 占用栅格地图构建(三)
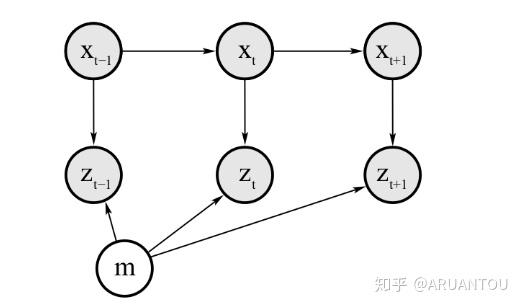
占用网格构图算法,主要是根据t时刻的有噪声的测量数据和机器人当前的位姿来生成连续地图。如下: 任何占用栅格建图的黄金法则都是给定数据计算地图的后验概率 我们可以发现,地图的构建就是寻找判断是...

德国弗莱堡大学关于机器人学的在线分享
Albert-Ludwigs-Universität Freiburg (德国弗莱堡大学) 弗莱堡大学(德语:Universität Freiburg),全称为阿尔伯特-路德维希-弗莱堡大学(Albert-Lu...

APP反馈提交列表
这里是APP反馈提交的内容
surveyor slam建图中需要的信息参数-breezyslam的应用
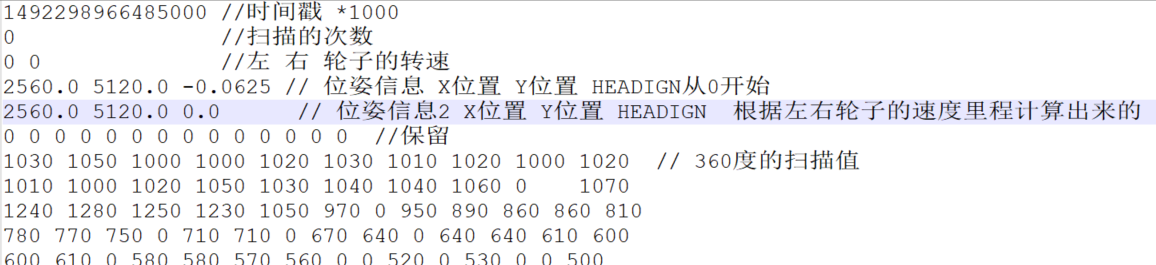
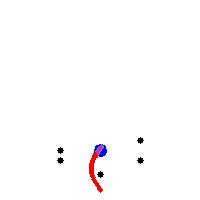
在github中找到一个关于slam入门级别建图的学习,这里简单的梳理一下。 chasis 底盘中可以采集传感器的信息,包括BNO055 的imu信息,还有左右两轮子的转速信息。由于DIY这个slam建图的工...

分享国外的农业机器人
农业机器人 本文的最新修改时间为2018年1月14日。 农业或农用机器人是为农业目的而部署的机器人。 在过去的两年中,它们被发布为原型或出售了许多能够执行各种农事的机器人...

依托rovi改装的储纳箱机器人
之前改装过洗脚机器人,最近又看上了储纳箱子,想给他安上一双翅膀让他飞翔。 http://blog.cvosrobot.com/?post=575 不过内置的操作系统都是一样的,正所谓...
dwa区域避障路径规划算法的优化
dwa区域避障路径规划算法一直在不断的优化和测试,最近又在算法中添加了距离目标的成本。在所有的成本消耗计算中,包括和添加了 航向得分 、速度得分 、障碍物距离得分,目标距离得分。程序中将所有的得分都归一化,也就是都...
为甚么GPS要使用kalman滤波
卡尔曼滤波器使您可以滤除噪声并组合不同的测量值以计算答案。它们是一种特别强大的过滤器,并且数学上很优雅。如果没有矩阵数学软件包,它们通常很难计算,简单过滤器的示例以及带有简单矩阵软件包的一般情况都包含在源代码中。鲁道夫·卡尔曼(Rud...
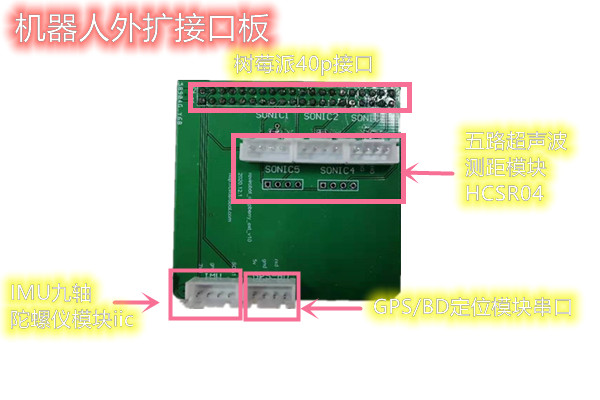
rovi 超声波树莓派外扩模块
专门为机器人的外设做的一块外接小板,集成了超声波接口,可以接5路,一路gps bd定位模块。还有imu九州陀螺仪模块。 能直接插在树莓派的接口上。 ...
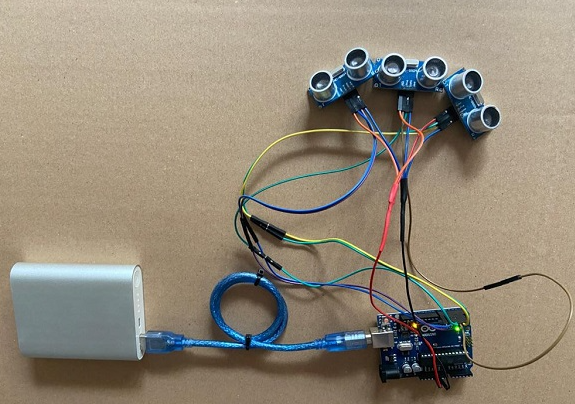
如何构建避障机器人
在本教程中,您将学习如何使用Arduino和三个HC-SR04超声波传感器构建障碍物检测和躲避机器人。该机器人是具有两个驱动轮和一个后脚轮的低成本移动平台。它包括三个传感器,可感知环境中的障碍。 机器人...
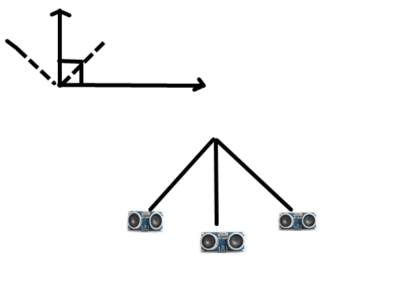
三面超声波测距及坐标位置转换
打算使用三个超声波测距避障模块部署到机器人智能车上,之间间隔45度角。以笛卡尔坐标系为基准,可以根据每个测出的距离 求出所对应的障碍物的位置。假设车头面向正前方,theta = 90度,那么根据三角函数可求出左右障碍物的位...
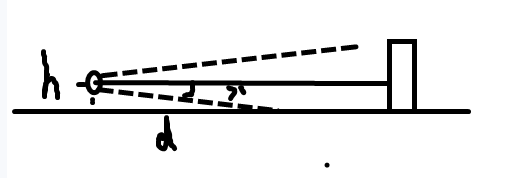
超声波模块hcsr04 固定高度的研究
hcsr04通常作为测距避障模块固定在机器人智能车的车体上。但是固定多高才是最佳的高度呢? 现在对超声波避障模块做以下简单的说明。 一般HCSR04的扫描角度商家给出的为15度,当我们水平放置的时候实际水平角度...
自动除草机器人系统改装制作
机器人车技发网分享一个外国的牛人们创建的一个低功率的,基于FPGA硬件的农业的农业机器人平台,用于从野外检测和清除杂草的项目。 该项目借助机器视觉和神经...