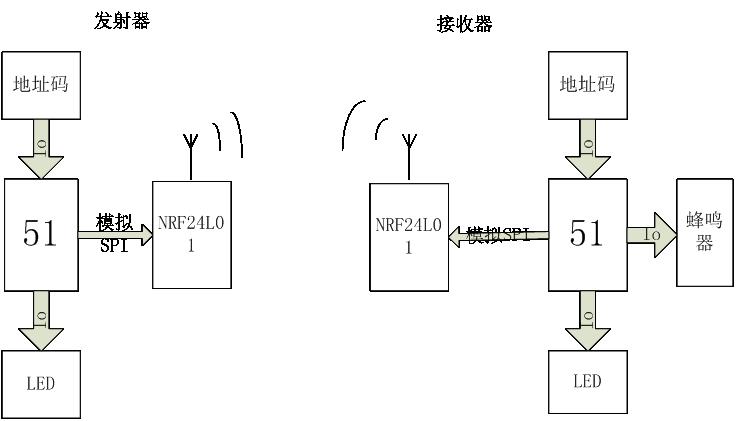
无线防丢器的代码
#include <reg52.h>
#include <intrins.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define u8 unsigned char
//****************************************NRF24L01端口定义***************************************
sbit CE = P2^0; // Chip Enable pin signal (output)
sbit CSN = P2^1; // Slave Select pin, (output to CSN, nRF24L01)
sbit IRQ = P2^5; // Interrupt signal, from nRF24L01 (input)
sbit MISO = P2^4; // Master In, Slave Out pin (input)
sbit MOSI = P2^3; // Serial Clock pin, (output)
sbit SCK = P2^2; // Master Out, Slave In pin (output)
sbit ADDr1=P0^0;
sbit ADDr2=P0^1;
sbit ADDr3=P0^2;
sbit ADDr4=P0^3;
sbit ADDr5=P0^4;//按键
sbit LED1=P2^6;
sbit bee=P2^7;
uchar stus;
uchar stus2;
u8 SPI_Flag;
uchar stat; //存放在可位寻址的区域
//******************************************************************************************
uchar bdata sta; //NRF24L01的STATUS寄存器标志位
sbit RX_DR =sta^6;//RX_DR 为 sta 的第六位
sbit TX_DS =sta^5;//TX_DS 为 sta 的第五位
sbit MAX_RT =sta^4;//MAX_RT 为 sta 的第四位
//*************************************NRF24L01**************************************************
#define TX_ADR_WIDTH 5 // 本机地址宽度设置(数字指数组中元素的个数)
#define RX_ADR_WIDTH 5 // 接收方地址宽度设置
#define TX_PLOAD_WIDTH 20 // 4 字节数据长度
#define RX_PLOAD_WIDTH 20 // 4 字节数据长度
uchar const TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //本地地址
uchar const RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //接收地址
uchar RX_BUF[TX_PLOAD_WIDTH];
//*****************************NRF24L01寄存器指令,详细请对照,Page18******************************
#define MAX_TX 0x10 //达到最大发送次数中断
#define TX_OK 0x20 //TX发送完成中断
#define RX_OK 0x40 //接收到数据中断
#define READ_REG 0x00 // 读寄存器指令
#define WRITE_REG 0x20 // 写寄存器指令
#define RD_RX_PLOAD 0x61 // 读取接收数据指令
#define WR_TX_PLOAD 0xA0 // 写待发数据指令
#define FLUSH_TX 0xE1 // 冲洗发送 FIFO指令
#define FLUSH_RX 0xE2 // 冲洗接收 FIFO指令
#define REUSE_TX_PL 0xE3 // 定义重复装载数据指令
#define NOP 0xFF // 保留
//****************************SPI(nRF24L01)寄存器地址,详细请对照,Page18-24**********************
#define CONFIG 0x00 // 配置收发状态,CRC校验模式以及收发状态响应方式
#define EN_AA 0x01 // 自动应答功能设置
#define EN_RXADDR 0x02 // 可用信道设置
#define SETUP_AW 0x03 // 收发地址宽度设置
#define SETUP_RETR 0x04 // 自动重发功能设置
#define RF_CH 0x05 // 工作频率设置
#define RF_SETUP 0x06 // 发射速率、功耗功能设置
#define STATUS 0x07 // 状态寄存器
#define OBSERVE_TX 0x08 // 发送监测功能
#define CD 0x09 // 地址检测
#define RX_ADDR_P0 0x0A // 频道0接收数据地址
#define RX_ADDR_P1 0x0B // 频道1接收数据地址
#define RX_ADDR_P2 0x0C // 频道2接收数据地址
#define RX_ADDR_P3 0x0D // 频道3接收数据地址
#define RX_ADDR_P4 0x0E // 频道4接收数据地址
#define RX_ADDR_P5 0x0F // 频道5接收数据地址
#define TX_ADDR 0x10 // 发送地址寄存器
#define RX_PW_P0 0x11 // 接收频道0接收数据长度
#define RX_PW_P1 0x12 // 接收频道0接收数据长度
#define RX_PW_P2 0x13 // 接收频道0接收数据长度
#define RX_PW_P3 0x14 // 接收频道0接收数据长度
#define RX_PW_P4 0x15 // 接收频道0接收数据长度
#define RX_PW_P5 0x16 // 接收频道0接收数据长度
#define FIFO_STATUS 0x17 // FIFO栈入栈出状态寄存器设置
u8 count;
u8 cnt=0;
u8 T_time;
u8 swt=0;
u8 ledflg=0;
u8 SPI_Flag;
u8 BUFFEPAC[3]={0XAA,0X55,0x00};
/******************************************************************************************
/*延时函数
/******************************************************************************************/
void inerDelay_us(uchar n)
{
for(n;n>0;n--)
_nop_();
}
void delay_ms(uchar x)
{
uchar i, j;
i = 0;
for(i=0; i<x; i++)
{
j = 250;
while(--j);
j = 250;
while(--j);
}
}
/****************************************************************************************************
/*IO口模拟SPI总线的代码,SPI便发送边接收
/*函数:uchar SPI_RW(uchar uchar)
/*功能:根据SPI协议,写一个字节数据到NRF24L01,同时从中读出一个字节
/****************************************************************************************************/
uchar SPI_RW(uchar byte)
{
uchar bit_ctr;
for(bit_ctr=0;bit_ctr<8;bit_ctr++) // 循环8次
{
MOSI = (byte & 0x80); // byte的最高位输出到MOSI,取最高位发送
byte = (byte << 1); // 左移一位
SCK = 1; // 拉高SCK,24L01从MOSI中读入一位数据,同时从MISO输出一位数据
byte |= MISO; // 读MISO的最低位
SCK = 0; // SCK置低
}
return(byte); // 返回读出的数据(从机的答复)
}
/****************************************************************************************************/
/*通过SPI方式对模块进行写操作
/*功能:NRF24L01读写寄存器函数,写数据value到reg寄存器,同时返回状态字
//要给模块发送命令,让后它回复你表示收到了指令,然后执行发送的指令
/****************************************************************************************************/
uchar SPI_RW_Reg(uchar reg, uchar value)
{
uchar status;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
SPI_RW(value); // 写数据到该寄存器中
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/****************************************************************************************************
/*通过SPI通讯方式将模块收到的数据读取到单片机
/*函数:uchar SPI_Read(uchar reg)
/*功能:从reg寄存器读一字节
/****************************************************************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN置低开始传输数据
SPI_RW(reg); // 选择需要操作的寄存器
reg_val = SPI_RW(0); // 从该寄存器中读取数据
CSN = 1; // CSN拉高,结束数据传输
return(reg_val); // 返回读取到的寄存器数据
}
/*********************************************************************************************************
/*函数:uchar SPI_Write_Buf(uchar reg, uchar *pBuf, uchar bytes)把pBuf缓存中的数据写入到nRF24L01,
通常用来写入发射通道数据或接收/发送地址
/*功能: 用于写数据:reg 为寄存器地址;pBuf:为待写入数据地址;uchars:写入数据的个数
/*********************************************************************************************************/
uchar SPI_Write_Buf(uchar reg, uchar *pBuf, uchar bytes)
{
uchar status,byte_ctr;
CSN = 0; //SPI使能
status = SPI_RW(reg); //选择寄存器,同时返回状态字,告诉模块准备要发送命令
for(byte_ctr=0; byte_ctr<bytes; byte_ctr++) //逐个字节发送,每发送一个字节指针就右移一位
SPI_RW(*pBuf++);
CSN = 1; //关闭SPI
return(status); //返回状态寄存器
}
/****************************************************************************************************/
/*函数:uchar SPI_Read_Buf(uchar reg, uchar *pBuf, uchar bytes) 从reg寄存器读出bytes个字节,通常用来读取接收通道数据或接收/发送地址
/*功能: 用于读数据,reg:为寄存器地址,pBuf:为待读出数据地址,uchars:读出数据的个数
/****************************************************************************************************/
uchar SPI_Read_Buf(uchar reg, uchar *pBuf, uchar bytes)
{
uchar status,byte_ctr;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(byte_ctr=0;byte_ctr<bytes;byte_ctr++)
pBuf[byte_ctr] = SPI_RW(0); //逐个字节从寄存器中读出
CSN = 1; //CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/******************************************************************************************************
/*函数:unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)
/*功能:数据读取后放如rx_buf接收缓冲区中
/******************************************************************************************************/
unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)
{
unsigned char revale=0;
CE=0;
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, RX_ADDRESS, RX_ADR_WIDTH); // 写接收端地址和地址宽度
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0F); // IRQ收发完成中断响应,16位CRC ,主接收
CE=1;
inerDelay_us(130);
sta=SPI_Read(STATUS); // 读取状态寄存其来判断数据接收状况
if(RX_DR) // (接收数据中断)判断是否接收到数据
{
CE = 0; //SPI使能
SPI_Read_Buf(RD_RX_PLOAD,rx_buf,TX_PLOAD_WIDTH); //从RX_FIFO寄存器中读取接收到的数值
revale =1; //读取数据完成标志
}
SPI_RW_Reg(WRITE_REG+STATUS,sta); //接收到数据后RX_DR,TX_DS,MAX_PT都置高为1,通过写1来清楚中断标志
return revale;
}
//函数:void nRF24L01_TxPacket(unsigned char * tx_buf)
//功能:发送 tx_buf中数据
u8 nRF24L01_TxPacket(unsigned char * tx_buf)
{
CE=0; //StandBy I模式
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); //装载接收端地址和接收端地址的宽度
SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 装载数据和数据的宽度
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x1a); //自动重发延时500+86us,重发10次
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收发完成中断响应,16位CRC,主发送
SPI_RW_Reg(WRITE_REG+STATUS,0X7e); // 清除中断,以便开始发送数据
CE=1; //置高CE,激发数据发送
CE=0;
//////////////////////////////////////////////NRF24L01_IRQ!=0
inerDelay_us(35);
while(IRQ!=0);//等待发送中断
stat=SPI_Read(STATUS);//读取状态寄存器的值
SPI_RW_Reg(WRITE_REG+STATUS,stat); //清除TX_DS或MAX_RT中断标志
if(stat&MAX_TX)//达到最大重发次数
{
SPI_RW_Reg(FLUSH_TX,0xff);//清除TX FIFO寄存器
return MAX_TX;
}
if(stat&TX_OK)//发送完成
{
return TX_OK;
}
return 0xff;//其他原因发送失败
inerDelay_us(10);
}
//NRF24L01初始化
void init_NRF24L01()
{
inerDelay_us(100);
CE=0;
CSN=1;
SCK=0;
// SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); //写本地地址和本地地址位的宽度
// SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); //装载接收端地址和接收端地址的宽度
// SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 频道0自动,ACK应答允许
// SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); //允许接收地址只有频道0
// SPI_RW_Reg(WRITE_REG + RF_CH, 0); //设置信道的工作频率为2.4G,收发必须一致
// SPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //设置接收数据长度,本次设置为4字节
// SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); //设置发射速率为1Mkbps,发射功率为最大值0dB
}
/**************************************************/
/**************************************************
函数:RX_Mode()
描述:
这个函数设置nRF24L01为接收模式,等待接收发送设备的数据包
/**************************************************/
void RX_Mode(void)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 接收设备接收通道0使用和发送设备相同的发送地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // 接收通道0选择和发送通道相同有效数据宽度
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // CRC使能,16位CRC校验,上电,接收模式
CE = 1; // 拉高CE启动接收设备
}
/**************************************************/
/**************************************************
函数:TX_Mode()
描述:
这个函数设置nRF24L01为发送模式,(CE=1持续至少10us),
130us后启动发射,数据发送结束后,发送模块自动转入接收
模式等待应答信号。
/**************************************************/
void TX_Mode()
{
CE = 0;
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写入发送地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 为了应答接收设备,接收通道0地址和发送地址相同
// SPI_Write_Buf(WR_TX_PLOAD, BUF, TX_PLOAD_WIDTH); // 写数据包到TX FIFO
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x1a); // 自动重发延时等待250us+86us,自动重发10次
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // CRC使能,16位CRC校验,上电
CE = 1;
}
void LED_ON(u8 freq)
{
T_time=freq;
}
void main()
{
u8 Id;
u8 TM_0=0;
//u8 tmp_buf[];
TMOD|=0x01; //定时器工作在方式1
TH0=(65536-46080)/256;
TL0=(65536-46080)%256; //定义定时器初值
ET0=1; //开定时器0 中断
PT0=0;
EA=1; //开总中断
TR0=1; //中断开始
P0=0XFF;
// P2=0XFF;
init_NRF24L01();
stus=0;
stus2=0;
LED1=0;
stus=SPI_Read(0x07);
//Id=Readaddr();
BUFFEPAC[3]=Id;
stus2=SPI_Read(0x00);
stus=SPI_Read(0x07);
delay_ms(10);
stus2=SPI_Read(0x00);
//if(stus==14)
//{if(stus2==8)LED1=1;}
//else LED1=0;
while(1)
{
if(ADDr5==0)
{
delay_ms(10);
if(ADDr5==0)
{
while(!ADDr5);
if( nRF24L01_TxPacket(BUFFEPAC)==TX_OK)
{
LED1=1;
BUFFEPAC[0]=0xaa;
BUFFEPAC[0]=0x55;
BUFFEPAC[0]=0x00;
delay_ms(200);
}
else
{
}
//正在发送}
//
}
}
LED1=0;
// else //就是接收到数据
// {
// LED1=0;
// RX_Mode();
// SPI_Flag=SPI_Read(STATUS);
// if(SPI_Flag&RX_DR)//有数据触发中断
{
// SPI_Read_Buf(RD_RX_PLOAD, RX_BUF, 3);
// if(RX_BUF[0]==STARD_CODE_AA)//如果接收到的数据和之前发送的一样
// {
// if(RX_BUF[1]==STARD_CODE_55)//如果接收到的数据和之前发送的一样
{
// if(RX_BUF[2]==Id)//如果接收到的数据和之前发送的一样
// {
// TR0=0; //关闭定时器
// TM_0=count;
// count=0;
// swt=1;//打开开关
// LED_ON(TM_0); //灯闪烁频率
// }
//
// }
// }
}
}
}
}
/*定时器0中段服务子程序,如果3s内未能得到温度数据则显示错误********/
void time0() interrupt 1 using 1 //定时器0 工作方式1
{
TH0=(65536-46080)/256;
TL0=(65536-46080)%256; //11.05692M晶振下重新载入延时时间,如果晶振为12M,则为被减数则为50000
count++;
cnt++;
if(swt==1)
{
if(cnt>=T_time)
if(ledflg==0)
{
LED1=1;//green led
ledflg=1;
}
else
{
LED1=0;
ledflg=0;
}
}
}
发射器接收器代码设置一样。


最新评论