


最新资讯
 置顶推荐
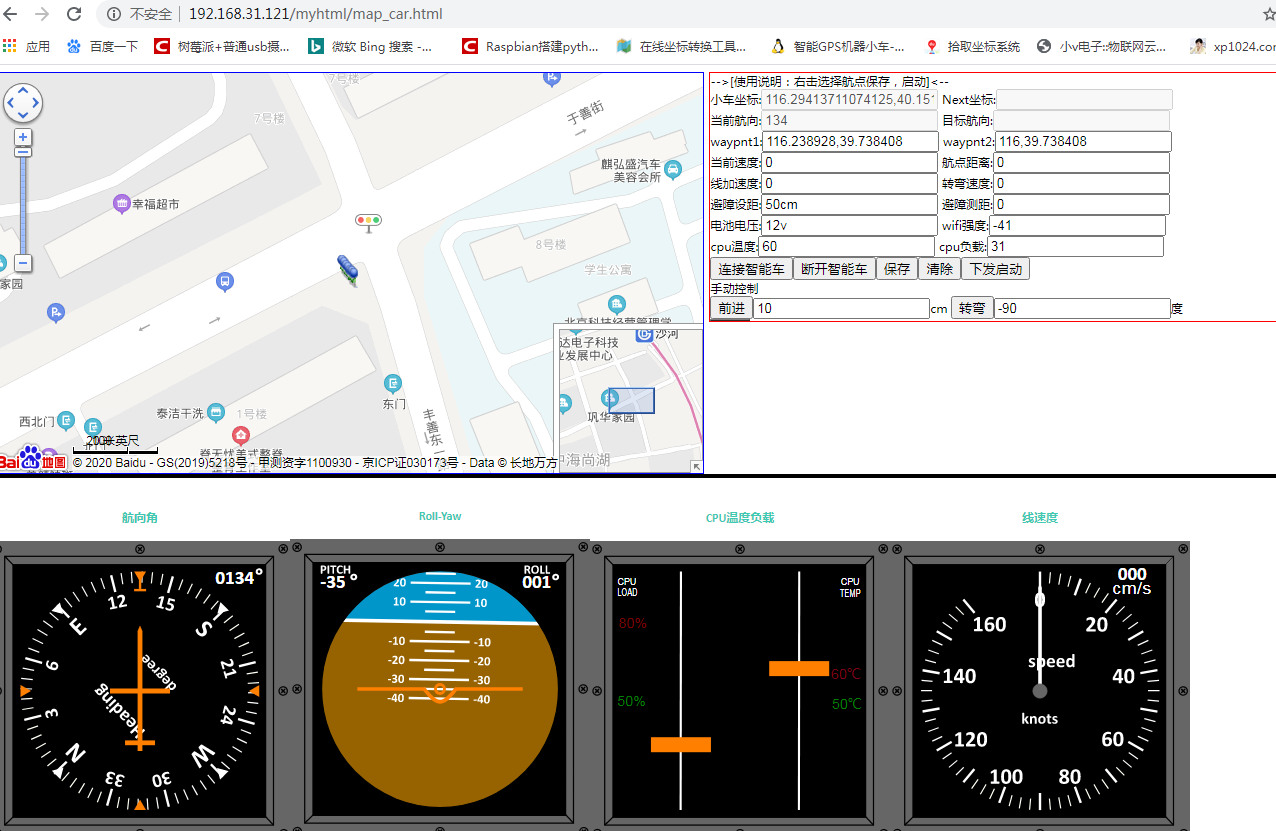
置顶推荐 GPS定位导航室外定位导航车开发说明教程,想去哪里点哪里!
最近会更新如下教程,欢迎跟进。智能小车 GPS导航车,gps定位导航车 &nb...
 置顶推荐
置顶推荐 《机器人GPS定位导航小车的制作》-目录
创客:机器人GPS定位导航小车的制作-基于物联网的应用 目录 前言 3 画册 4 第1章机器人小车基础知识 17 1.1 机器人小车全新认识 17 1.2 机器人小车释疑解惑 17 1.3 机...
置顶推荐 创客:机器人GPS定位导航小车的制作-基于物联网的应用
本页面专门讲述 该小车的制作。 本书市面上的书名《轮式自主移动机器人编程实战》 &...
 置顶推荐
置顶推荐 gps自定位巡逻管理平台系统简单发布
http://www.woyilian.com/gps_car 可以免费注册和登录,然后添加设备,利用地图进行规划。 今天是2020.9.16号,特意查了一下黄历,今天将云平台管理系统简单发布,此时距离上次关于GPS定位的...

LIO-SAM 配置 MID360 激光雷达完全指南
引言 MID360 是 Livox 推出的新一代混合固态激光雷达,具有 360° 水平视场角和 59° 垂直视场角,重量仅 265g,非常适合移动机器人和 SLAM 应用。本文将详细介绍如何在 Ubuntu 20.04+ROS Noetic...
hailo算力模块量化和编译yolov8n
我在Ultralytics Hub中训练了一个YOLOv8s 的模型,并导出为ONNX。接着使用Hailo DCF 工具,并成功生成了一个优化/量化的 HAR文件。不幸的是,在编译HEF文件的最后一步,卡住了。 后来看官方的说明和论坛发现...
COLORMAP_JET OPENCV 深度图热热图转换
```python raw_detections = infer_pipeline.infer(input_data) end_time = time.time() print(type(raw_detections)) print(len...
ubuntu22 设置分辨率出的问题
ubuntu22设置分辨率后 单机settings 无法出现 使用xrandr 查看支持的分辨率 然后使用 xrandr -s 1024x768 设置分辨率 xrandr -q Screen 0: mini...
hailo8的适配
3588 Ubuntu22.04 版本 python3.10 hailort runtime library 和 hailo-driver for pcie .需要源码编译从hailo 的github下载后,在Ubuntu 3588上自...
/lib/modules/5.10.160/build: No such file or directory.
编译驱动时发现 无法找到这个目录的文件。 根据网上的说明 要下载 Linux headers sudo apt-get install linux-headers-$(uname -r) 另外如果 /lib/modules/5.10.1...
ImportError: libGL.so.1: cannot open shared object file: No such file or directory
root@iZf8ziv3jfzkf275t9ksy3Z:~/easymqOS_GNSS/easymqOs_buildroadmap_waypoints# python3 -m pip install opencv-python-head...
ros2 usb camera的发布与web可视化查看相机图像
本文中使用的ros2 humble Ubuntu22 . usb camera 支持uvc 。 程序为 ros2 https://gitlab.com/boldhearts/ros2_v4l2_camera#usage-1 ...
Creation of subscriber failed: mbs_msgs
2年前买的moebius的stm32驱动板,发现不提供ROS的上位机资料。 尤其是用到了自定义的 mbs_msgs 协议包。 经过一番对比发现,该包和 riki_msgs 基本一样 [![](http://blog.cvosrobot...
机器人中常用的DDS
在mqtt和ROS1中发现是没有DDS 服务的。 MQTT与DDS是两种不同的消息传递协议,它们各自特有的设计理念和应用场景。 1、MQTT简洁轻量,适用于带宽有限且网络不稳定的场合; 2、DDS面向实时系统,提供更为丰富的服务品质(...
无人车与无人机协同的新探索
无人系统空地协同比赛任务为设计一个由四旋翼无人机及无人车构成的空地协同物资投放系统。无人机上安装垂直向下的激光笔,用于指示巡逻航迹。巡防区域为5m×5m。无人机巡逻时可覆盖地面0.8m宽度区域。以缩短完成全覆盖巡逻时间为原则,在巡防区域内,...