


最新资讯
 置顶推荐
置顶推荐 GPS定位导航室外定位导航车开发说明教程,想去哪里点哪里!
最近会更新如下教程,欢迎跟进。智能小车 GPS导航车,gps定位导航车 &nb...
 置顶推荐
置顶推荐 《机器人GPS定位导航小车的制作》-目录
创客:机器人GPS定位导航小车的制作-基于物联网的应用 目录 前言 3 画册 4 第1章机器人小车基础知识 17 1.1 机器人小车全新认识 17 1.2 机器人小车释疑解惑 17 1.3 机...
置顶推荐 创客:机器人GPS定位导航小车的制作-基于物联网的应用
本页面专门讲述 该小车的制作。 本书市面上的书名《轮式自主移动机器人编程实战》 &...
 置顶推荐
置顶推荐 gps自定位巡逻管理平台系统简单发布
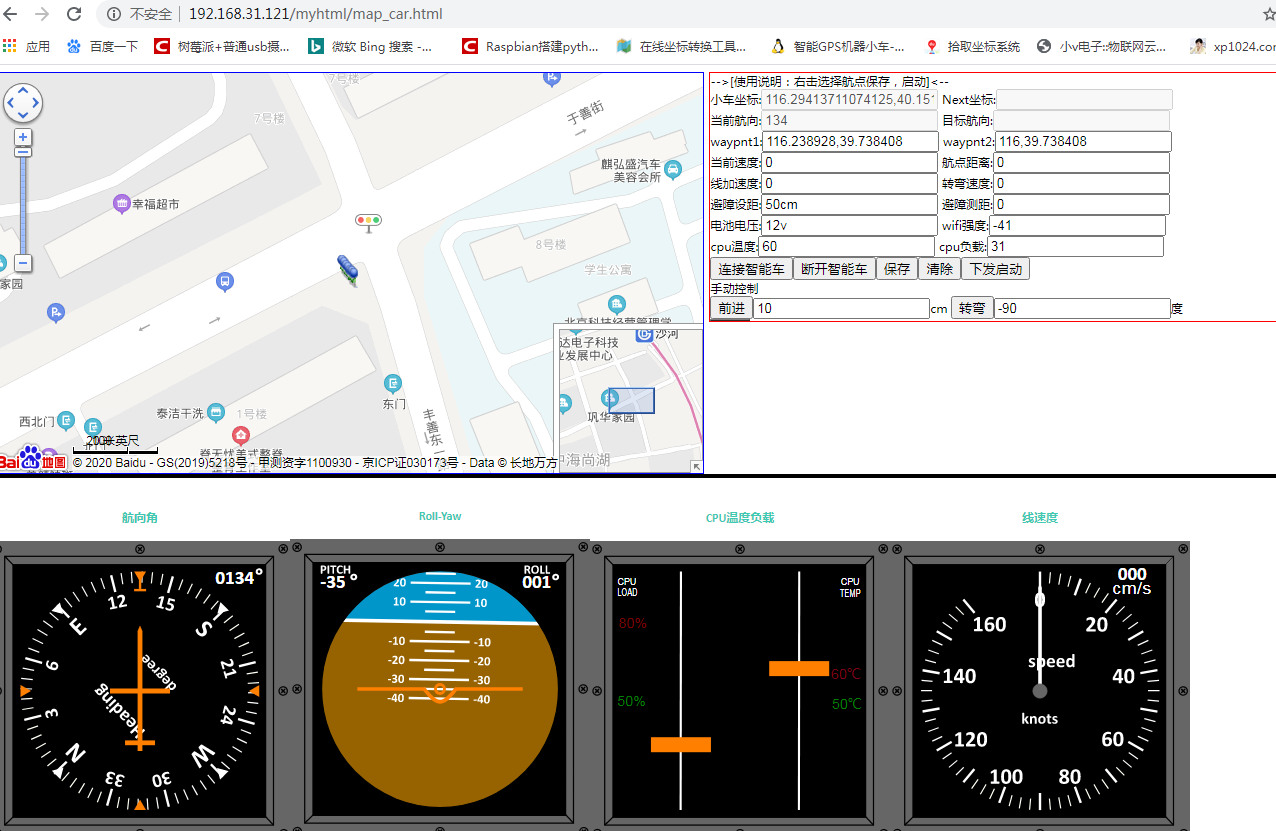
http://www.woyilian.com/gps_car 可以免费注册和登录,然后添加设备,利用地图进行规划。 今天是2020.9.16号,特意查了一下黄历,今天将云平台管理系统简单发布,此时距离上次关于GPS定位的...

hailo算力模块量化和编译yolov8n
我在Ultralytics Hub中训练了一个YOLOv8s 的模型,并导出为ONNX。接着使用Hailo DCF 工具,并成功生成了一个优化/量化的 HAR文件。不幸的是,在编译HEF文件的最后一步,卡住了。 后来看官方的说明和论坛发现...
COLORMAP_JET OPENCV 深度图热热图转换
```python raw_detections = infer_pipeline.infer(input_data) end_time = time.time() print(type(raw_detections)) print(len...
ubuntu22 设置分辨率出的问题
ubuntu22设置分辨率后 单机settings 无法出现 使用xrandr 查看支持的分辨率 然后使用 xrandr -s 1024x768 设置分辨率 xrandr -q Screen 0: mini...
hailo8的适配
3588 Ubuntu22.04 版本 python3.10 hailort runtime library 和 hailo-driver for pcie .需要源码编译从hailo 的github下载后,在Ubuntu 3588上自...
/lib/modules/5.10.160/build: No such file or directory.
编译驱动时发现 无法找到这个目录的文件。 根据网上的说明 要下载 Linux headers sudo apt-get install linux-headers-$(uname -r) 另外如果 /lib/modules/5.10.1...
ImportError: libGL.so.1: cannot open shared object file: No such file or directory
root@iZf8ziv3jfzkf275t9ksy3Z:~/easymqOS_GNSS/easymqOs_buildroadmap_waypoints# python3 -m pip install opencv-python-head...
ros2 usb camera的发布与web可视化查看相机图像
本文中使用的ros2 humble Ubuntu22 . usb camera 支持uvc 。 程序为 ros2 https://gitlab.com/boldhearts/ros2_v4l2_camera#usage-1 ...
Creation of subscriber failed: mbs_msgs
2年前买的moebius的stm32驱动板,发现不提供ROS的上位机资料。 尤其是用到了自定义的 mbs_msgs 协议包。 经过一番对比发现,该包和 riki_msgs 基本一样 [中,`ROS_NAMESPACE` 是一个环境变量,用于指定节点的命名空间(namespace)。命名空间是ROS中用来隔离节点和话题名称的一种机制,可以帮助组织和管理...