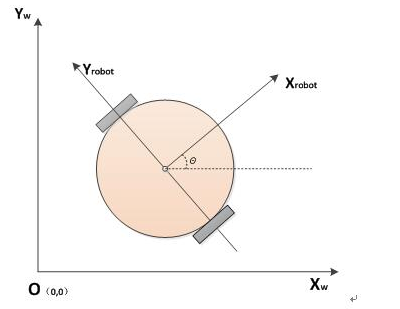
二轮差动模型的机器人底盘,是最常见的机器人底盘,像扫地机器人,循迹小车等。作为机器人的移动部件,它需要实现输入输出两大功能。 输入:接收控制指令速度V和角速度W(v,w)--单位m/s rad/s 输出:机器人...