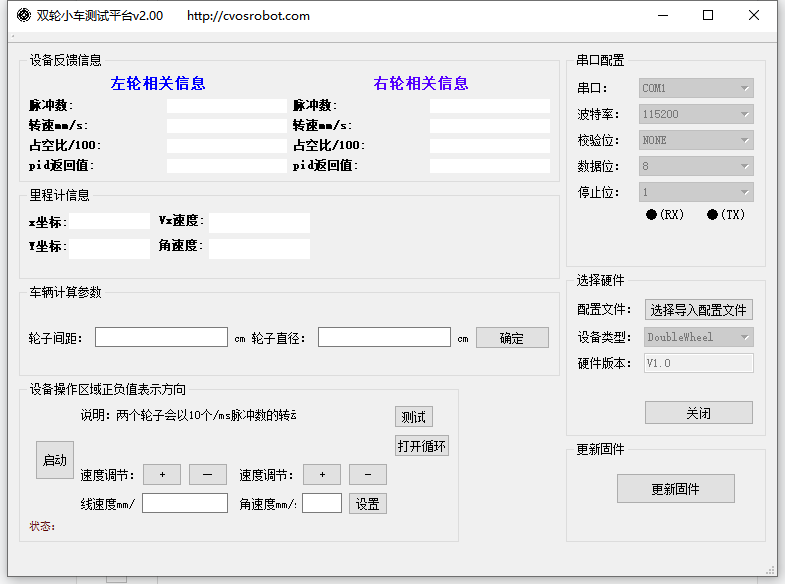
机器人车底盘驱动电机硬件测试小工具doublewheelv2.0
机器人车底盘驱动电机硬件测试小工具doublewheelv2.0 支持测试本店开发的双轮驱动板,有以下特色 可监听双轮的脉冲数; 可监听双轮的转速; ...

机器人车旋转特定角度的方法二
上一篇文章介绍了旋转的特定角度,想尝试在没有任何障碍物的广场中旋转角度的最优方向,用到概率仿真的算法。 得到最优旋转方向。 #include <time.h> #include <sys/time.h&...
机器人车旋转特定角度的方法
本方法结和IMU和里程计底盘实现。imu采集的heading范围需要在0-360之间变化,如果是0-180,-180-0最好转换为0-360方便计算。 如下程序为仿真,flg的值决定了小车左右转弯的方向。 arg1 是初始h...

机器人车底盘驱动电机选型小工具v1.0
一 前言 对于一些新手或者想挑选电机开发机器人的底盘的新人,由于缺少经验,无法提供合适的参数给供应商。 淘宝常见的供应商都会问你需要什么样的参数。 多少转? 电压多少v? ...