20多种Raspberry Pi计算机视觉教程
20多种Raspberry Pi计算机视觉教程
工程师们一直试图给机器人以视觉上的礼物。因此,他们必须使用计算机,算法,照相机等来复制人类视觉过程。
在DIY领域,Raspberry Pi是原型平台的女王。它在不同领域和多种应用中很有用。因此,为什么不在计算机视觉应用程序中使用它。这些项目对于导航,本地化,识别,分类,监视,阅读等开始变得异常激烈。
单板计算机,摄像头模块,视觉库(例如OpenCV)和一点点创造力几乎没有限制。
从本文探索的教程中您将看到,计算机视觉中一些最流行的应用程序涉及对象,人类的检测,跟踪和识别。无论您是要构建能够检测人类的机器人,还是要构建能够检测物体的自动化系统,Raspberry Pi板都是您项目的中心。
从这套精选的教程中,您将学习各种技巧,这些技巧可用于构建基于Pi的简单且经济高效的计算机视觉应用程序。
导航和避障
-
导航到目标
在bigfacerobotics上,Peter Neal在教程中向我们展示了如何构建能够通过检测图像的彩色边框导航到目标的自主机器人。

-
使用Python和OpenCV对Raspberry Pi机器人进行编程
在此项目中,设计人员希望使用py_websockets_bot库制作自主机器人。Python库通过网络接口与移动机器人通信,并发送控制机器人运动的命令。

-
RR.OP – RaspRobot OpenCV项目
该Raspberry Pi机器人使用对象的形状,颜色和纹理与外部环境进行交互。

-
最终项目汽车实验室
在此项目中,设计人员构建一个计算机视觉应用程序,以避免在由黑色平行线定义的较宽路径上出现障碍。 -
用于行跟随器的OpenCV和python
使用网络摄像头,OpenCV库,Python和Raspberry Pi板,您可以使用计算机视觉算法构建行跟随器机器人。

-
使用OpenCV进行障碍物检测
在本教程中,设计人员使用四个步骤来检测机器人前方的障碍物。第一步是捕获图像。第二步是将图像转换为灰度图像。第三步是稍微模糊它,然后在第四步中使用精明边缘检测来突出显示图像中的边缘。

-
自主的瓶回收机器人
在本教程中,您将找到如何构建一个生态友好型机器人,该机器人的设计旨在避免障碍物直到相机检测到并识别出瓶子。

跟踪与识别
-
Wall E机器人(物体/声音识别,AI)
本教程的灵感来自电影中的Wall-E机器人,并向您展示如何检测和跟踪物体。

-
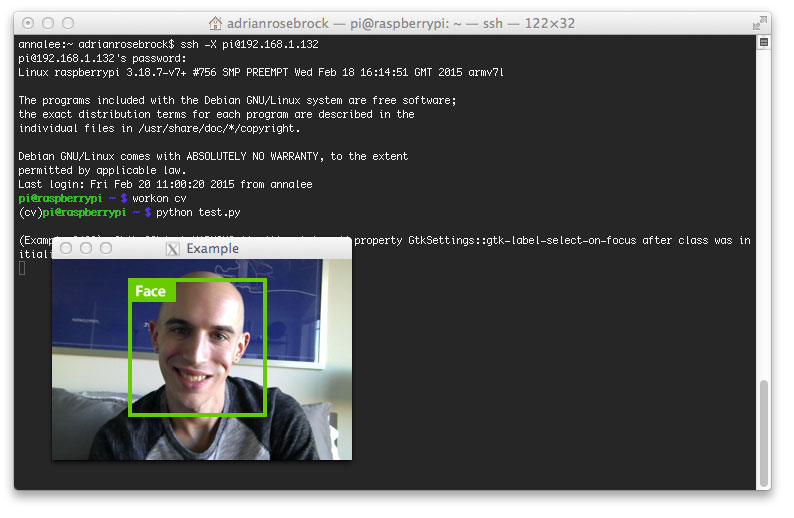
OpenCV&Pi Cam –步骤7:人脸识别
示例如何将Pi板与OpenCV一起使用来检测人脸。

-
网络摄像机项目之后的Raspberry Pi Motion
如果您打算构建运动跟踪网络平移和倾斜摄像机,本教程将向您展示如何从头开始构建它。

-
使用Python和OpenCV进行基本的运动检测和跟踪
这是如何为家庭监视构建视觉系统的示例。该系统旨在检测和跟踪人脸。

-
Raspberry Pi和Camera Pi模块:人脸识别教程
在本教程中的人脸识别系统中,鲍里斯·兰多尼(Boris Landoni)向您展示了如何定位人脸(如脸,眼睛,鼻子等)的位置。

-
使用PID
颜色的Raspberry Pi颜色跟踪无处不在。在本教程中,说明了如何使用OpenCV PID控制算法来跟踪对象。

-
使用Raspberry Pi,Arduino和Python进行伪装检测
该项目的想法是构建一个DIY视觉系统来代替热像仪。在本指南中,介绍了如何通过将高分辨率的可见波长相机与低分辨率的红外传感器结合使用多光谱成像。

-
使用C ++,OpenCV和cvBlob在Raspberry Pi上进行对象跟踪
该项目旨在跟踪对象,并且该算法在OpenCV和cvBlob中均已实现。

-
脚步:基于照相机的
人数统计系统,价格不到60英镑本教程向您展示如何构建便宜的视觉系统,以统计拜访建筑物或建筑物中人员的人数。

-
使用Python和OpenCV进行实时无人机对象跟踪
这是一个使用飞行无人机从空中跟踪对象的简单项目。

-
教程:使用CamShift跟踪视频中的对象
这是Adrian Rosebrock的另一篇教程,向您展示了如何使用CamShift算法查找和跟踪视频中的对象。

对象分类
-
重温扫描问题:Raspberry Pi扫描机
您可以构建视觉应用程序,以检测文档中是否应包含页面。本教程向您介绍视觉系统的工作原理。
奥林巴斯数码相机
-
使用OpenCV和Python比较直方图的3种方法使用OpenCV和
Python,您有三个比较直方图的选项。本教程介绍了所有这三个选项。

-
Raspberry Pi /乐高积木球机
您喜欢用乐高积木建造机器人吗?在本教程中,您可以找到如何使用乐高积木,Raspberry Pi,摄像头模块和OpenCV来构建球分类机。

您可能也对以下Raspberry Pi资源感兴趣:
Raspberry Pi相机指南