如何根据机器人左右轮的编码计数在图像上画轨迹
根据左右轮子的编码数转换成轨迹,然后在opencv的图片上将轨迹traj描出来。
data.txt部分如下
第3和第4为左右轮子的编码数。
0,0,128,54,105,60,60,469,496
0,0,130,170,103,60,60,469,496
0,0,132,555,555,60,60,470,496
0,0,134,555,555,60,60,469,496
0,0,135,169,555,60,60,469,496
0,0,137,169,97,60,60,498,500
0,0,139,169,104,60,60,469,496
0,0,140,170,103,60,60,469,496
0,0,142,169,105,60,60,469,496
0,0,144,170,103,60,60,469,497
0,0,145,169,104,60,60,469,496
0,0,147,169,104,60,60,469,496
0,0,149,169,105,60,60,469,497
0,0,150,169,104,60,60,498,498
occ_grid.cpp
如下
#include <iostream>
#include <stdlib.h>
#include <algorithm>
#include <time.h>
#include <unistd.h>
#include <sys/time.h>
#include <stack>
#include <opencv2/opencv.hpp>
#include "sensor_model.h"
#include "occ_grid.h"
#include <fstream>
#include <sstream>
using namespace std;
using namespace cv;
string Trim(string& str)
{
str.erase(0,str.find_first_not_of(" \t\r\n"));
str.erase(str.find_last_not_of(" \t\r\n") + 1);
return str;
}
static double CalculateRadians(int degree)
{
//弧度
double current_angle = degree *M_PI/ 180 ; //角度
return current_angle;
}
#define Map_Size 300
double Sonars_logs[Map_Size][Map_Size]={0};
int main()
{
int mm_per_tick = 5 ;//Encoder resolution
int Xr = float(Map_Size/2);// #Set intial robot position
int Yr = float(Map_Size/2);
// 读文件
ifstream inFile("Data.txt", ios::in);
string lineStr;
vector<vector<string>> strArray;
int cnt =0;
int cellsize = 50 ;// #Set cell width and height in mm
float scale = float(1)/cellsize;// #Set map scale
Mat src(Map_Size, Map_Size, CV_8UC1, cv::Scalar(0));
int row = Map_Size;//src.rows;//300
int col = Map_Size;//src.cols;//300
Mat Map_log_sonar = Mat(row, col, CV_64F,cv::Scalar(0.0));
Mat Map_log_sonar2= Mat(row, col, CV_64F,cv::Scalar(0.0));
Mat Map_log_sonar_res= Mat(row, col, CV_64F,cv::Scalar(0.0));
while (getline(inFile, lineStr))
{
// 打印整行字符串
// cout << lineStr << endl;
// 存成二维表结构
stringstream ss(lineStr);
string str;
vector<string> lineArray;
// 按照逗号分隔
while (getline(ss, str, ',')){
lineArray.push_back(str);
}
string angle_str = Trim(lineArray[2]) ;//Robot heading angle
int angle = atoi(angle_str.c_str());
int inv_angle = angle +30 ;//angle for rear sonar sensor
int left_angle = angle -30 ;
string a0 = Trim(lineArray[0]);
string a1 = Trim(lineArray[1]);
int avencoder = (atoi(a0.c_str()) + atoi(a1.c_str()))/2 ;//Distance travelled by robot is approximated to average of both encoder readings
string Fsonar_str = Trim(lineArray[3]) ;//Sonar values are in cm, convert to mm by muliplying by 10
int Fsonar = atoi(Fsonar_str.c_str())*10;
string Rsonar_str = Trim(lineArray[4]);
int Rsonar = atoi(Rsonar_str.c_str())*10;
//string LIR = Trim(lineArray[5])*10 ;//Same for IR sensor values
//string RIR = Trim(lineArray[6])*10 ;
cout << " angle : " << angle << endl;//
cout << " inv_angle : " << inv_angle << endl;//
cout << " Fsonar : " << Fsonar << endl;//
cout << " Rsonar : " << Rsonar << endl;//
printf("convert begin \n");
cv::Mat Aimg(Map_Size, Map_Size, CV_64F,cv::Scalar(0.0));
Sonars_logs[Yr][Xr] = 1;
std::memcpy(Aimg.data, Sonars_logs, Map_Size*Map_Size*sizeof(double));
cv::add(Aimg,Map_log_sonar,Map_log_sonar);
Map_log_sonar = Map_log_sonar + Aimg;
int Xrnext = Xr + float((cos(CalculateRadians(angle)) * (avencoder*mm_per_tick)*scale)) ;//
// Calculate new robot position from encoder readings
int Yrnext = Yr + float((sin(CalculateRadians(angle)) * (avencoder*mm_per_tick)*scale));
//#cv2.line(map_image, (int(Xr),int(Yr)), (int(Xrnext),int(Yrnext)), 150, 1)
Xr = Xrnext;
Yr = Yrnext;
exp(Map_log_sonar, Map_log_sonar2);//e的0次方等于1
Mat img2(Map_Size, Map_Size, CV_8UC1, cv::Scalar(0));
Mat img3(Map_Size, Map_Size, CV_8UC1, cv::Scalar(0));
img2 =1- (1 / ( 1 + Map_log_sonar2));
img3 = 1 -img2;
//resize(src, dst, cv::Size(1000, 1000));
resize(img3,img3,Size(1000,1000));
imshow("Map_log",img3);
waitKey(0);
}
}
occ_grid.h 如下
#ifndef OCC_GRID_h
#define OCC_GRID_h
//#include <opencv2/opencv.hpp>
//#ifdef __cplusplus
//extern "C" {
//#endif
extern int offline_test();
extern double Sonars_logs[300][300];
//#ifdef __cplusplus
//}
//#endif
#endif
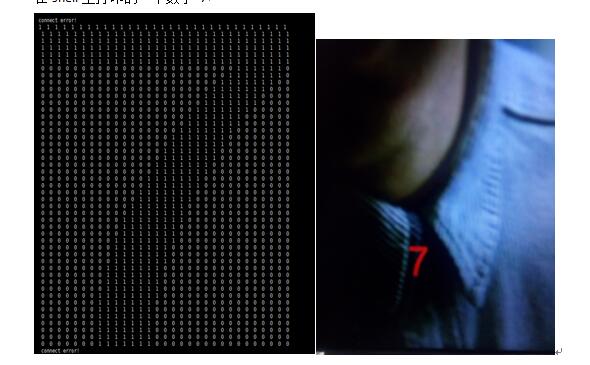
最终执行完后,效果如下。

下一篇将根据x,y坐标画轨迹。