easy_mqos 发布imu节点教程
easy_mqOS 是我仿照ROS 搭建的基于MQTT的简易机器人分布式开发框架,是一种轻量级并且十分容易上手的框架,支持多个节点的主题的订阅和单topic发布,节点之间独立、解耦合。没有复杂的文件配置,一定的make编程基础,像正常启动服务一样,就可以运行。甚至可以在嵌入式linux上使用,而不用安装Ubuntu没有复杂的插件,很容易上手和学习。支持c.c++ ,python,js.MQTT协议特点
使用发布/订阅消息模式,提供一对多的消息分发,解除应用程序耦合。
消息传输对有效载荷内容不可知。
使用TCP/IP提供基础网络连接。
有3个消息发布服务质量级别。
轻量传输,协议交换最小化,以降低网络网络流量。
提供一种机制,当客户端异常中断时,利用 Last Will 和 Testament 特性来通知有关各方。
对于不需要搭建太复杂的机器人,我觉得easy_mqos就可以满足自主巡航智能的功能.
在Download官网中可以看到支持 Ubuntu\debian rasbian

在Linux 终端需要安装mosquitto的相关库
sudo apt-get install mosquitto-dev
sudo apt-get install mosquitto-clients 这个包只有不到几百kB。
easy_mqos的文件路径结构如下。
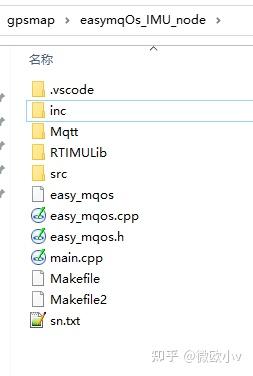
inc 为用户自定义的头文件,imu发布节点使用RTIMULIB的库,支持MPU9250、GY85等多轴传感器。
easy_mqos是封装的用户程序,内部使用回调函数和订阅的主题和发布的主题建立.
main.cpp
#include "easy_mqos.h"
#include "Mqtt/client_shared.h"
#include <vector>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include "Mqtt/client_pub_sub.h"
#include "Mqtt/mosquitto.h"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
#include <signal.h>
#include <errno.h>
#include <assert.h>
#include <string.h>
#include <math.h>
/*pthread*/
#include "sys/ipc.h"
#include "sys/msg.h"
#include "pthread.h"
#include <arpa/inet.h>
#include <net/if.h>
#include "method_parse.h"
#include "cJSON.h"
#include "easy_mqos.h"
#include "imu.h"
using namespace std;
void IMU_filter_callback(sensors_msg_imu _imu)
{
char topic_buf[2048]={0};
char value_buf[4096]={0};
char send_buf[4096]={0};
#if 1
cJSON * root = cJSON_CreateObject();
if(!root) {
printf("get root faild !\n");
}
cJSON_AddItemToObject(root, "sq", cJSON_CreateNumber(_imu.seq));//
cJSON_AddItemToObject(root, "sc",cJSON_CreateNumber(_imu.stamp_ss));
cJSON_AddItemToObject(root, "ms",cJSON_CreateNumber(_imu.stamp_ms));
cJSON_AddItemToObject(root, "ow", cJSON_CreateNumber(_imu.orientation.w));
cJSON_AddItemToObject(root, "ox", cJSON_CreateNumber(_imu.orientation.x));
cJSON_AddItemToObject(root, "oy",cJSON_CreateNumber(_imu.orientation.y));
cJSON_AddItemToObject(root, "oz", cJSON_CreateNumber(_imu.orientation.z));
cJSON_AddItemToObject(root, "gx", cJSON_CreateNumber(_imu.angular_velocity.x));
cJSON_AddItemToObject(root, "gy", cJSON_CreateNumber(_imu.angular_velocity.y));
cJSON_AddItemToObject(root, "gz", cJSON_CreateNumber(_imu.angular_velocity.z));
cJSON_AddItemToObject(root, "ax", cJSON_CreateNumber(_imu.linear_acceleration.x));
cJSON_AddItemToObject(root, "ay", cJSON_CreateNumber(_imu.linear_acceleration.y));
cJSON_AddItemToObject(root, "az", cJSON_CreateNumber(_imu.linear_acceleration.z));
cJSON_AddItemToObject(root, "mx", cJSON_CreateNumber(_imu.mag.x));
cJSON_AddItemToObject(root, "my", cJSON_CreateNumber(_imu.mag.y));
cJSON_AddItemToObject(root, "mz", cJSON_CreateNumber(_imu.mag.z));
memcpy(value_buf,cJSON_Print(root),strlen(cJSON_Print(root)));
unsigned int length = strlen(value_buf);
// printf("length:%d \n :%s \n",strlen(value_buf),value_buf);
//sprintf(topic_buf,"%s/state/gps",chargename);
cJSON_Delete(root);
#endif
#if defined MQTT_REMOTE_SERVER
// sprintf(send_buf,"mosquitto_pub -h www.woyilian.com -t %s -m \"%s\"",topic_buf,value_buf);
#elif defined MQTT_TERMINAL_SERVER
//sprintf(send_buf,"mosquitto_pub -t %s -m \"%s\"",topic_buf,value_buf);
#endif
// printf("%f %f %f \n",_imu.mag.x,_imu.mag.y,_imu.mag.z);
// printf("heading :%f \n",atan2(_imu.mag.y,_imu.mag.x)*180/3.14);
//system(send_buf);
#if 0 //嵌套结构体转换成数组暂时没想到好办法
char tmp_buf[2048]={0};
memcpy(tmp_buf, (char*)&_imu.seq, sizeof(unsigned int));
memcpy(tmp_buf+sizeof(unsigned int), (char*)&_imu.stamp_ss, sizeof(time_t));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t), (char*)&_imu.orientation.w, sizeof(double));//下边4个是姿态的四元素
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+sizeof(double), (char*)&_imu.orientation.x, sizeof(double));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+2*sizeof(double), (char*)&_imu.orientation.y, sizeof(double));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+3*sizeof(double), (char*)&_imu.orientation.z, sizeof(double));
//下边3个是角速度
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+4*sizeof(double), (char*)&_imu.angular_velocity.x, sizeof(double));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+5*sizeof(double), (char*)&_imu.angular_velocity.y, sizeof(double));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+6*sizeof(double), (char*)&_imu.angular_velocity.z, sizeof(double));
//下边3个是线加速度
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+7*sizeof(double), (char*)&_imu.linear_acceleration.x, sizeof(double));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+8*sizeof(double), (char*)&_imu.linear_acceleration.y, sizeof(double));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+9*sizeof(double), (char*)&_imu.linear_acceleration.z, sizeof(double));
//下边3个是mag
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+10*sizeof(double), (char*)&_imu.mag.x, sizeof(double));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+11*sizeof(double), (char*)&_imu.mag.y, sizeof(double));
memcpy(tmp_buf+sizeof(unsigned int)+sizeof(time_t)+12*sizeof(double), (char*)&_imu.mag.z, sizeof(double));
unsigned int length = sizeof(unsigned int)+sizeof(time_t)+12*sizeof(double);
printf("length:%d \n",length);
#endif
// printf("message:%s \n",tmp_buf);
publish_message(length,value_buf);
return ;
}
/*******************************************************************************
* function name : main
* description : main function for
* param[in] : none
* param[out] : none
* return : 0-success,-1-fail
*******************************************************************************/
int main (int argc, char ** argv)
{
easymqos *e_demo = new easymqos(CLIENT_PUB);
e_demo->Init_Pub("/sensors/imu_node_pub");//发布的主题
e_demo->Set_broker("127.0.0.1");
e_demo->Set_config_Pub();
IMU_Task(IMU_filter_callback);//启动任务并设置回调函数
return 0;
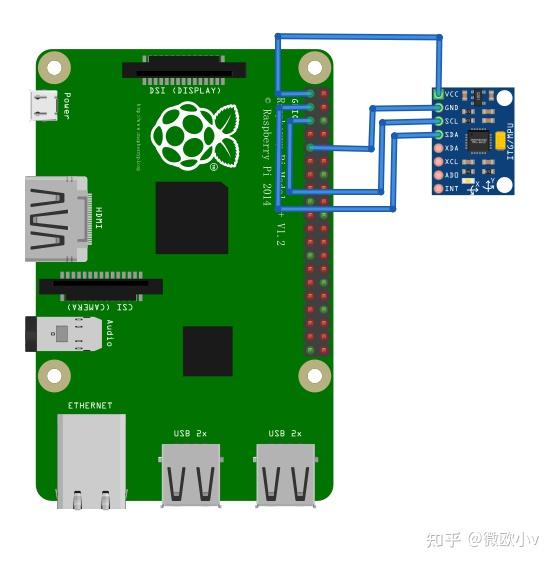
} 硬件连接GY85

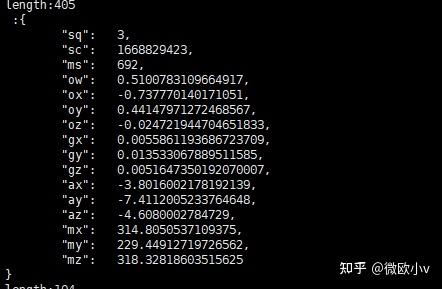
打印的信息
从window 工具中 收到的数据
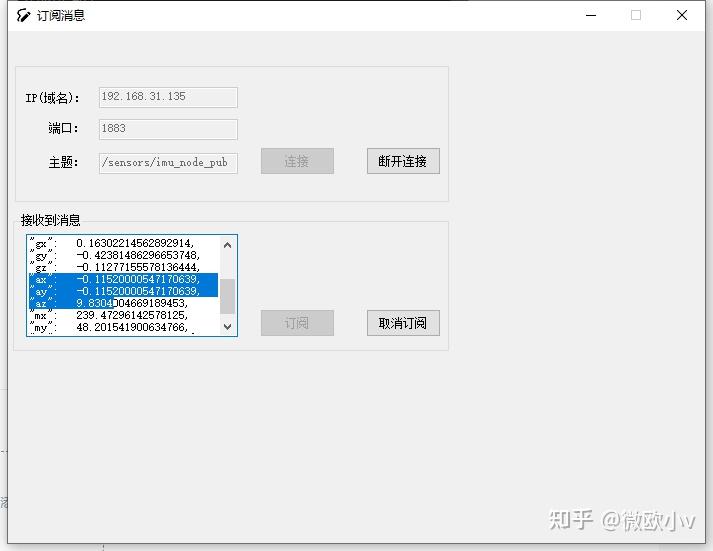

最后就可以观察GY85的工作情况进行调试了。
上述终端的 源码
https://github.com/horo2016/easyMQOS




