使用python结合opencv占用栅格地图的实现(对数几率回归)(一)
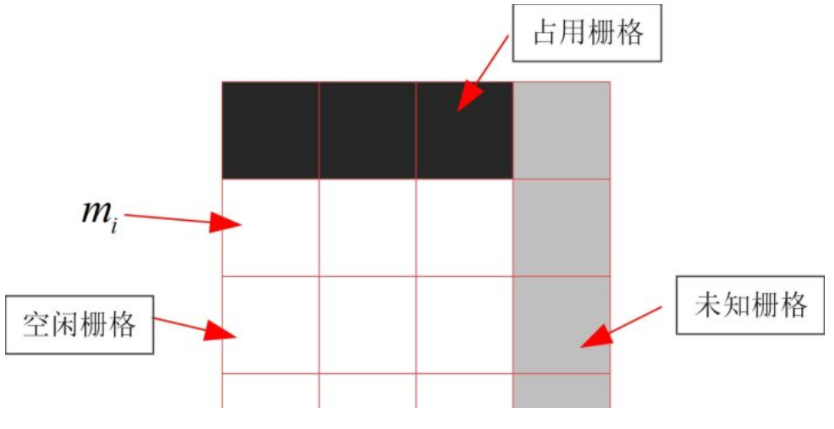
占用栅格地图occupancy grid map 是将一张图片(width * height)用一些单元的小细胞格(cell)来进行拆分,然后可以使用贝叶斯的概率公式进行 “是0非1”的估算,在小细胞格子将概率值(0-1)乘以灰度值2...
占用栅格地图occupancy grid map 是将一张图片(width * height)用一些单元的小细胞格(cell)来进行拆分,然后可以使用贝叶斯的概率公式进行 “是0非1”的估算,在小细胞格子将概率值(0-1)乘以灰度值2...