QQ空间
新浪微博
腾讯微博
人人网
微信
主页
登录
关于我们
APP反馈提交
浴足机器人
寻找合作
联系我们
gtihub
CSDN
机器人车套件
GPS导航定位IORt物联网机器人套件
机器车云平台
物联网远程控制模块
蓝牙迷你桌面机器人
智能车分类
小工具
底盘驱动电机选型小工具
底盘电机测试小工具
MQtt监听发布工具
机器车云平台
AI-Camera
快捷搜索:
ROS2
vl53l0
GPS户外定位机器人
物联网与机器人IORT
GPS导航定位IORt机器人套件
首页
/ 栅格地图构建
occupancy grid mapping 占用栅格地图构建(三)
小v
2021-4-17 3:01
4353
0
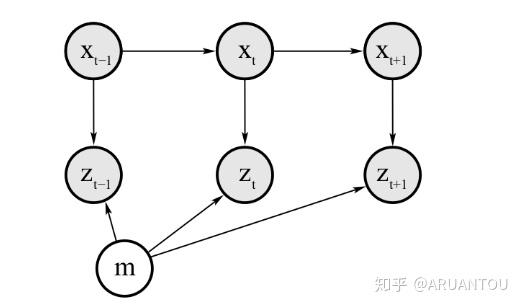
占用网格构图算法,主要是根据t时刻的有噪声的测量数据和机器人当前的位姿来生成连续地图。如下: 任何占用栅格建图的黄金法则都是给定数据计算地图的后验概率 我们可以发现,地图的构建就是寻找判断是...
sitemap