远程控制机器人车的三种玩法
配网阶段
1、 USB wifi模块的网络请根据商家提供的说明进行实名认证和配置
2、 树莓派机器人的配网
初次使用,需要配置好WiFi的名称和密码,以便机器人上网需求。
步骤:
1、连接好硬件,给树莓派供电。树莓派系统起来后,顶层的扩展板指示灯会常亮、明亮。
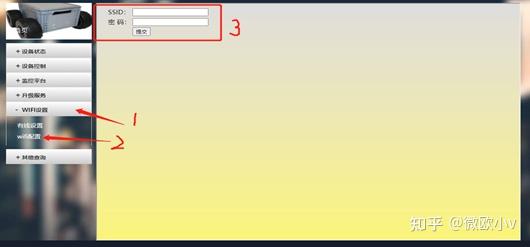
2、系统起来后,长按顶层的扩展板上的按键5秒钟,发现顶层的扩展板指示灯变成闪烁状态后,打开手机搜索热点,”gps_car”并连接,密码是123456789
3、手机成功连接后,网页搜索192.168.1.1 进入系统的网页。如果出现多次连接无法获取IP地址,可多按2-3次。最后实在不行,可将手机热点设置成【woyilian】 ,密码:【123456789】
3、 提交后,短按顶层的扩展板上的按键1秒钟,发现顶层的扩展板指示灯变成明亮变暗亮后,关机成功,拔掉电源重新启动,等待1分钟。
三种玩法
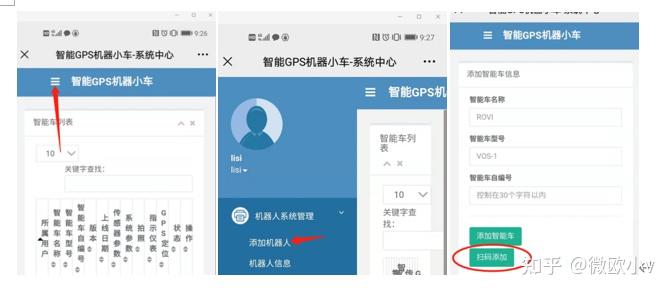
在开始动手玩儿之前请在机器人Iot平台注册和添加设备。微信或浏览器扫码打开链接,注册.
平台链接》》 设备码》》

注册完后扫码登录。登录IOT平台后,依次单击该设备的二维码。
1、 远程控制玩法
玩法1 、远程摇杆控制
在平台中打开机器人功能操作。选择

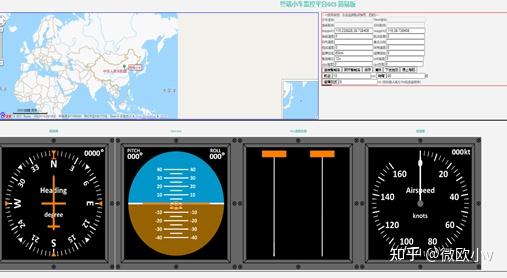
玩法2 、远程定位显示
在平台中打开机器人功能操作。选择

该显示建议用电脑网页打开
玩法3 、路径规划
参考玩法2打开网页。鼠标右键单击可以规划出5个航点,并下发启动。可以观察机器人的行驶情况。
玩法4、配置摄像头和语音模块或者使用第三方摄像
结合玩法1 ,利用手机上下分屏技术,实现远程遥控驾驶和远程视频。类似这样:





