easymqos_web 机器人交互软件
easymqos_web 是robot机器人的用户交互软件。由视觉动力机器人的作者开发维护。属于easymqos的子分支。
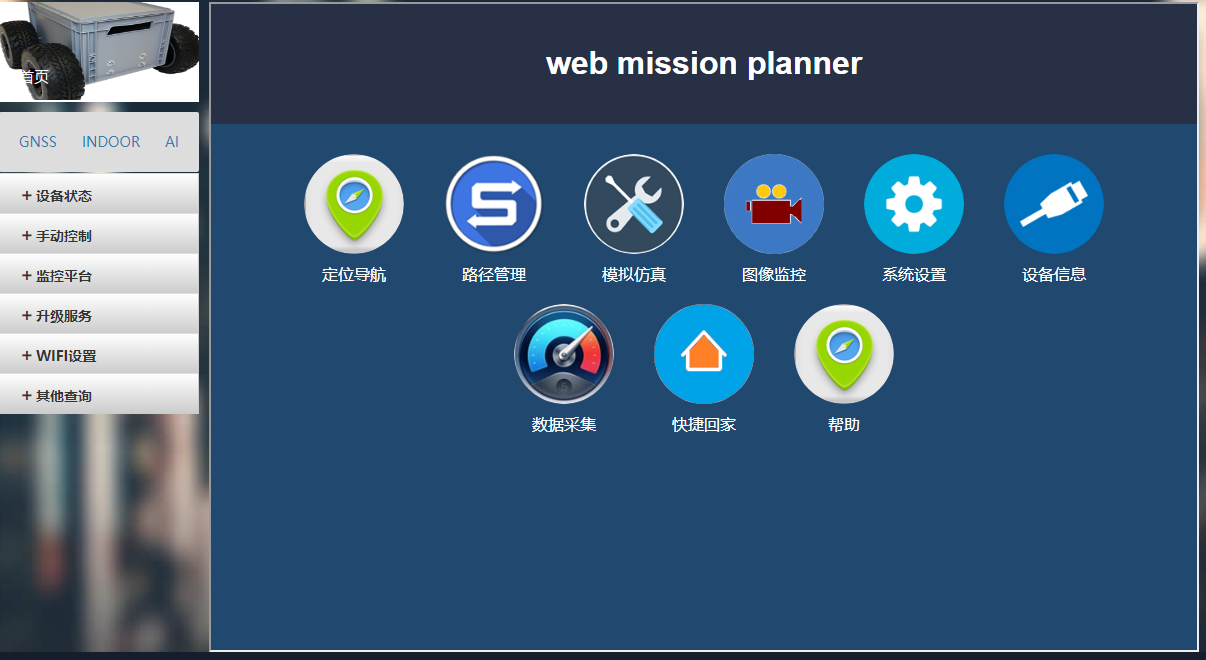
easymqos_web主要分为 户外gnss 、室内slam、AI三个大版块。
easymqos_web 集成了地图,使用户可以像 mission planner 一样规划路径。
easymqos_web 集成了摇杆控制、twist键盘控制,使用户可以摇杆操作或者使用turtlesim的twist 一样控制运动。

左侧中GNSS 、INDOOR、AI 可以将右侧切换成全屏模式。
左侧列表中,可以快速进入,手动控制。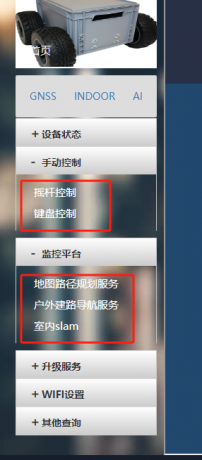
目前得版本主要可以用的上有红框中的这些功能。
上述功能的使用需要配合 easymqos 进行使用。
easymqos 的下载地址:https://github.com/horo2016
地图路径规划的视频操作在这里:
集成了mjpegstreamer 、第三方视频控件、rtp\rtmp等视频流控件。
集成了2d雷达点云显示、仪表显示。包含路线任务管理、名称自定义、语音管理、语音任务等。
easymqos 大而全,完全为机器人爱好者服务。
使用mqtt开源协议。
每条协议开放并配有c/c++ 和python demo。
使用简单容易。
使用mqtt to ROS的数据可快速转换并应用到OS中。
1 什么是easymqos-web
easymqos_web 是robot机器人的用户交互软件。由视觉动力机器人的作者开发维护的开源项目。属于easymqos的子分支。easymqos web是使用非常简单的HTML+js开发的web ,可以集成于树莓派、nano 等任何嵌入式Linux系统中。通过打开浏览器并输入机器人终端的IP地址后操作。
easymqos 的页面相互独立,解耦,使用单独的topic和JSON协议实现通信。
easymqos 搭配easymqos DIY机器人更快更方便,是交互更友好。
户外GPS版本的首页2 easymqos-web 户外GPS版的特色
easymqos_web主要分为 户外gnss 、室内slam、AI三个大版块。
easymqos_web 集成了地图展示功能,使用户可以像 mission planner 一样规划路径,规划固定路线,设定目的地、生成道路通行图等。
easymqos_web 集成了摇杆控制、twist键盘控制,使用户可以摇杆操作或者使用turtlesim的twist 一样控制运动。
easymqos 具有大而全的特点,具有mission planner 和webviz的一些功能,通过切换按钮实现组合展示,可以将单独的页面集成到一个页面中,通过切换按钮展示。
3 功能快速一览
固定路线功能
固定路线自定义路线名称
每一个固定路线可以使用规划路径的功能将路径规划好,然后可以自定义路线的名字。单击上述固定路线后,机器人终端按事先规划好的路线开始自主导航。然后会出现下面导航功能中的组合界面。
导航功能
导航页面导航功能的组合页面包括左侧仪表和右侧4框组成的可滑动大小的显示框。
按住滑动窗口大小
除此之外,右上角的"+"可以替换其他的页面功能展示。
例如单击显示地图右上角的+ 可以替换为其他地图显示。
任意窗口替换
其他的页面还可以切换成常见的视频和图像
替换内容可选择
mjpeg-streamer ,甚至第三方摄像头也可以接入作为导航功能展示。
上述组合中每一个区域都是一个单独的页面html,每一个html都采用独立的mqtt-topic协议实现展示和控制。所以可以任意切换而不影响。
去目的地
去目的地可自定义文字
去目的地也可以编辑目的地名称保存。
目的地和固定路线的不同之处在于,它是地图中一个坐标,固定路线是一串坐标(坐标的集合)。
使用两者功能需要注意,一般在固定路线上需要打卡签到或者巡更标记。而选择目的地的场景是用户在任意一个地方临时更改任务,需要算法及时规划出到达新目的地的路线。
路线管理和目的地管理
路线管理和目的地管理
这两个按钮可以进入修改、删除路线(目的地)的操作。
剩下的图像监控可以切换到图像监控的页面,查看来自机器人终端的图像。
快捷回家
快捷回家是无论在任何地方都可以令机器人回家的操作入口。
语音识别管理
语音识别管理 是自定义的需要识别语音和指定操作的绑定入口。
例如,自定义语音:
“导航去菜鸟驿站”,绑定的操作为:定位-目的地路线规划-导航。
”设置音量大小为50“,绑定的操作为 amixer -c 1 cset numid=4 50%
上述的语音可删除 修改 增加。
上述来源于《轮式自主移动机器人编程实战》部分内容,软件更多的视频讲解可在B站查看。
https://space.bilibili.com/523059643/channel/collectiondetail?sid=2384857
开源工程:
https://github.com/horo2016/easyMQOS




