粒子滤波-基于图像匹配的粒子滤波定位原理和优化方法
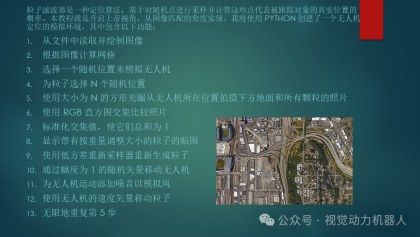
粒子滤波器是一种定位算法,基于对随机点进行采样并计算这些点代表被跟踪对象的真实位置的概率。本教程就是开启上帝视角,从图像匹配的角度实现,我将使用 python 创建了一个无人机定位的模拟环境,其中包含以下功能:
从文件中读取并绘制图像
根据图像计算网格
选择一个随机位置来模拟无人机
为粒子选择 N 个随机位置
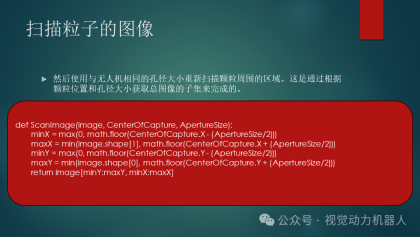
使用大小为 N 的方形光圈从无人机所在位置拍摄下方地面和所有颗粒的照片
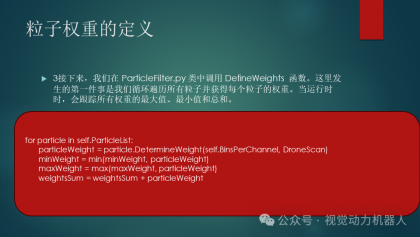
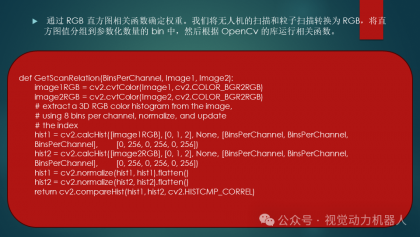
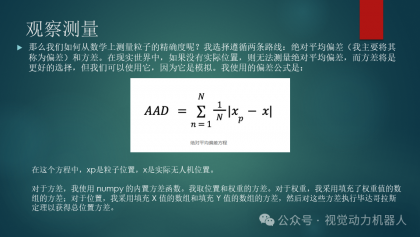
使用 RGB 直方图交集比较照片
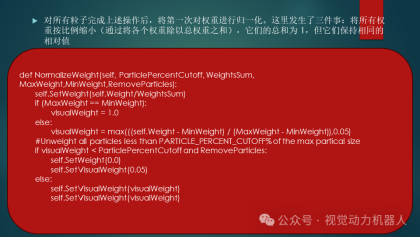
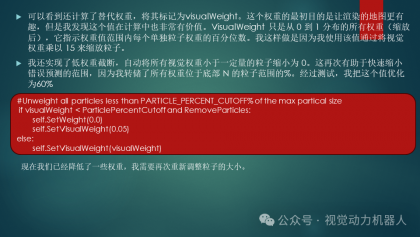
标准化交集值,使它们总和为 1
显示带有按重量调整大小的粒子的贴图
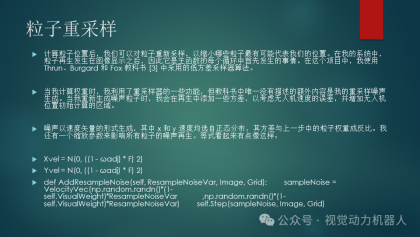
使用低方差重新采样器重新生成粒子
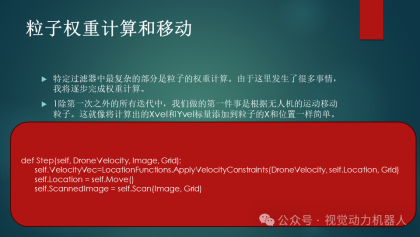
通过幅度为 1 的随机矢量移动无人机
为无人机运动添加噪音以模拟风
使用无人机的速度矢量移动粒子
无限地重复第 5 步