开源路径规划与定位显示的方法和步骤
本文档包含以下内容:
1手动规划路径
2 路径信息接收
3 GPS定位发送
4 定位显示
1 手动规划路径
请先注册并登录网站
http://www.woyilian.com/gps_cargin/index.html
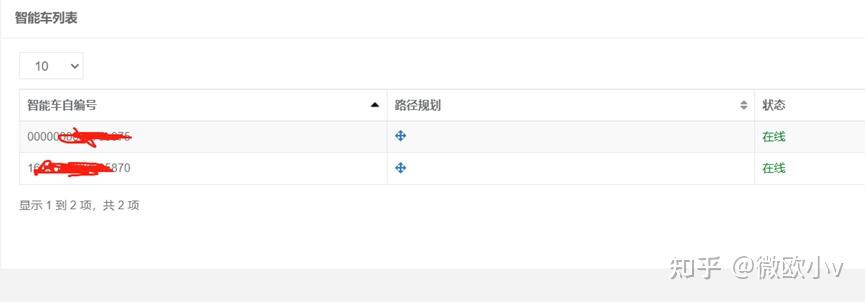
如图中,添加设备编号。编号唯一且为16位字符,如“123456dfgtkh34k”,否则冲突无法使用。树莓派用户可以参考2节【路径信息接收】获取。

然后选择路径规划,如图
然后右键单击路径点选选择坐标

下发经纬度:{"type":"1","lnt":"116.239642","lat":"40.093304"}
保存路径 {"type":"2","lnt":"0","lat":"0"}
删除路径 {"type":"3","lnt":"0","lat":"0"}
2 路径信息接收
首先在树莓派或者其他的Linux系统安装 mosquito
sudo apt-get install mosquitto-dev
sudo apt-get install mosquitto-clients
git clone https://github.com/horo2016/openCRobotics.git
cd mqtt_waypointsave/
从github 网站git clone 代码mqttwaypoints至树莓派,已经在树莓派3B/+、ubuntu测试,然后 make 生成waypoint 程序,使用sudo ./waypoint ,执行一次,按ctrl +c 结束程序,获取sn.txt .
cat sn.txt查看 唯一序列号,将该序列号添加到网站上。
重新执行sudo ./waypoint 并在后台运行,云平台端显示在线后,打开路径规划菜单,规划完路径后,单击【保存】后可在程序所在路径下获取
waypoints.csv 内含经纬度路径信息.
示例:
云平台操作:

终端接收查看:

3 GPS定位发送
使用本包时依旧需要安装mosquitto ,接着从GitHub下载源码
git clone https://github.com/horo2016/GPS_Kalman.git
cd GPS_Kalaman
make
将ublox M8n 插入USb 口,默认的使用/dev/ttyAMA0 ,如果使用ttyUSB0可以更改程序重新make
然后进入云平台的路径规划,单击【连接智能车】可以查看定位信息。单击【断开智能车】后则不能接收GPS定位信息。
联系qq:839602830
v:13699147102




