
无人车与无人机协同的新探索
无人系统空地协同比赛任务为设计一个由四旋翼无人机及无人车构成的空地协同物资投放系统。无人机上安装垂直向下的激光笔,用于指示巡逻航迹。巡防区域为5m×5m。无人机巡逻时可覆盖地面0.8m宽度区域。以缩短完成全覆盖巡逻时间为原则,在巡防区域内,...
ROS中多机协同时,如何解决topic 相同造成的冲突问题
```cpp 在ROS(Robot Operating System)中,`ROS_NAMESPACE` 是一个环境变量,用于指定节点的命名空间(namespace)。命名空间是ROS中用来隔离节点和话题名称的一种机制,可以帮助组织和管理...
AI结合机器人的入门级仿真环境有哪些?
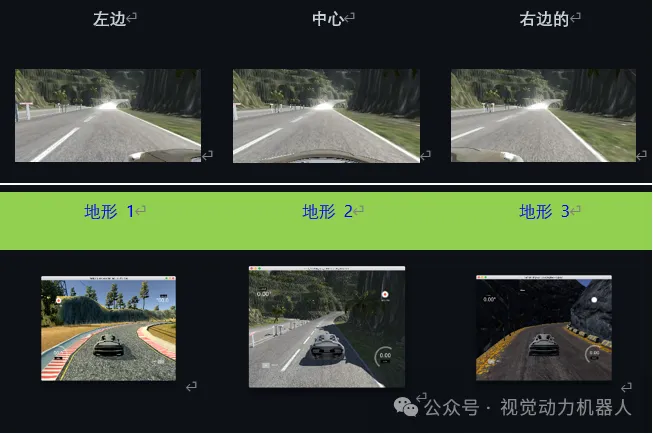
由于使用真实的机器人开发和测试应用程序既昂贵又费时,因此仿真已成为机器人应用程序开发中越来越重要的部分。在部署到机器人之前在仿真中验证应用程序可以通过尽早发现潜在问题来缩短迭代时间。通过模拟,还可以更轻松地测试在现实世界中可能过于危险的极端...