
无人车与无人机协同的新探索
无人系统空地协同比赛任务为设计一个由四旋翼无人机及无人车构成的空地协同物资投放系统。无人机上安装垂直向下的激光笔,用于指示巡逻航迹。巡防区域为5m×5m。无人机巡逻时可覆盖地面0.8m宽度区域。以缩短完成全覆盖巡逻时间为原则,在巡防区域内,...
ROS中多机协同时,如何解决topic 相同造成的冲突问题
```cpp 在ROS(Robot Operating System)中,`ROS_NAMESPACE` 是一个环境变量,用于指定节点的命名空间(namespace)。命名空间是ROS中用来隔离节点和话题名称的一种机制,可以帮助组织和管理...
AI结合机器人的入门级仿真环境有哪些?
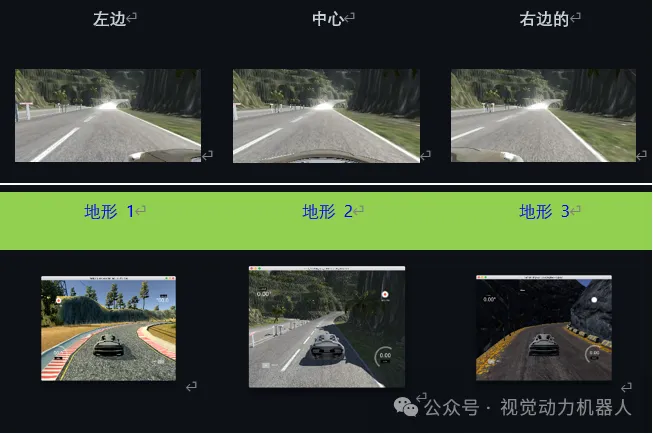
由于使用真实的机器人开发和测试应用程序既昂贵又费时,因此仿真已成为机器人应用程序开发中越来越重要的部分。在部署到机器人之前在仿真中验证应用程序可以通过尽早发现潜在问题来缩短迭代时间。通过模拟,还可以更轻松地测试在现实世界中可能过于危险的极端...
下载MV视频并提取音频文件使用ffmpeg转换为MP3
视频MV的文件可以来自各种视频网站,将Mv下载下来。 安装好ffmpeg 工具。 批量转换 python脚本 mp4tomp3.py import os import subprocess mp4...

粒子滤波-基于图像匹配的粒子滤波定位原理和优化方法
粒子滤波器是一种定位算法,基于对随机点进行采样并计算这些点代表被跟踪对象的真实位置的概率。本教程就是开启上帝视角,从图像匹配的角度实现,我将使用 python 创建了一个无人机定位的模拟环境,其中包含以下功能: 从文件中读取并绘制图像 ...

人工智能与机器人结合考验哪些工程能力?
人工智能与机器人的开发实战属于综合能力集中表现,从业务与工程落地方面探讨其中所必备的工程能力有哪些? [
室内slam建图与导航的维护和升级,做了哪些改动?
最近有两个小伙伴在使用easymqos 测试建图和导航,在这期间也发现了一些使用上的交互问题。 节点太多编译问题、一键启动问题、网页交互问题、和ROS的通信问题、语音控制。为此,笔者做出一些改进。 1 一键编译 ...