最新资讯

linux Cjson二维数组存储
cJSON * root = cJSON_CreateObject(); if(!root) { printf("get root faild !\n"); } cJSON_AddItemToObj...
户外GPS定位机器人的定位和建图的仿真实战(上)
https://mp.weixin.qq.com/s/J1Z0HE7ngroc2LWw-8ajiw 根据《轮式自主移动机器人编程实战》第10章的内容,本教程继续深入做个讲解,该教程主要是探索和验证:在没有高精度地图的情况下,实现精度不...

wiringPi 模拟iic 读取vl53的测距数据
用于机器人神经网络避障的输入,使用3路或者5路测距传感器作为神经网络的输入数据。 使用orangepi zero2 的板带gpio 没有使用自带的I2C,所以需要编写访问vl53底层iic协议。 根据以前单片...
使用机器人定位包robot-locallization的robot_localization实现传感器融合ROS 2
在本教程中,我将向您展示如何在模拟移动机器人上设置 robot_localization ROS 2 包。我们将使用robot_localization 包将来自/wheel/odometry主题的里程计数据与来自/imu/d...
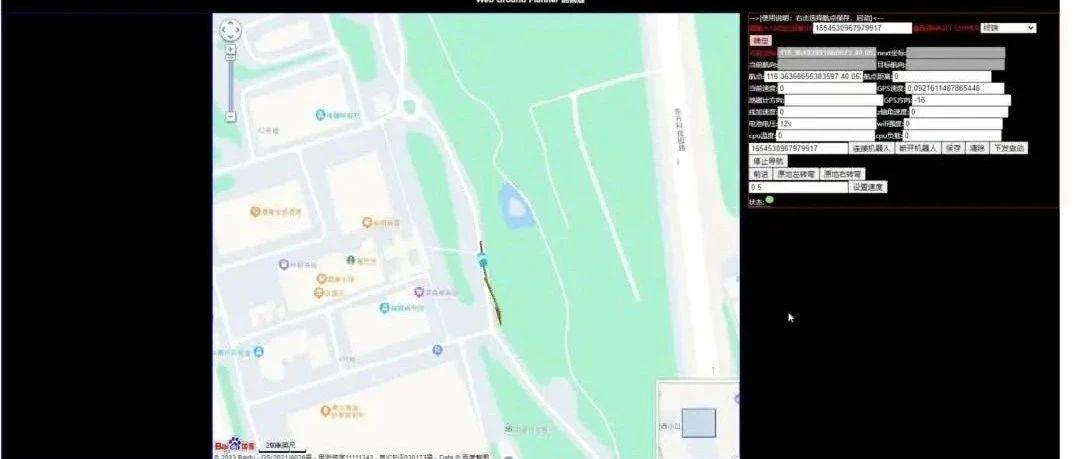
开源|带你快速入门和理解并模拟实现GPS户外机器人的定位与导航
开源|带你快速入门和理解并模拟实现GPS户外机器人的定位与导航mp.weixin.qq.com/s/c783rHvsMxiH9a6IDtMCNA 户外机器人的定位导航相对于需要建图的场景来说,是比较简单容易实现的,因...

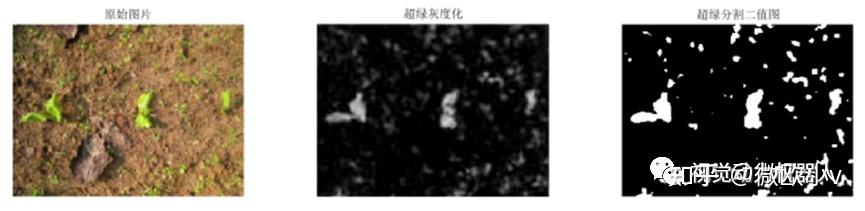
实战|基于园区道路和机器视觉方案的自动驾驶机器人实战(上)
https://mp.weixin.qq.com/s/LHj8qq9iWPc_9z5wyfXVSQ 原创 小vDiy 视觉动力机器人 2023-02-27 11:52 发表于北京...
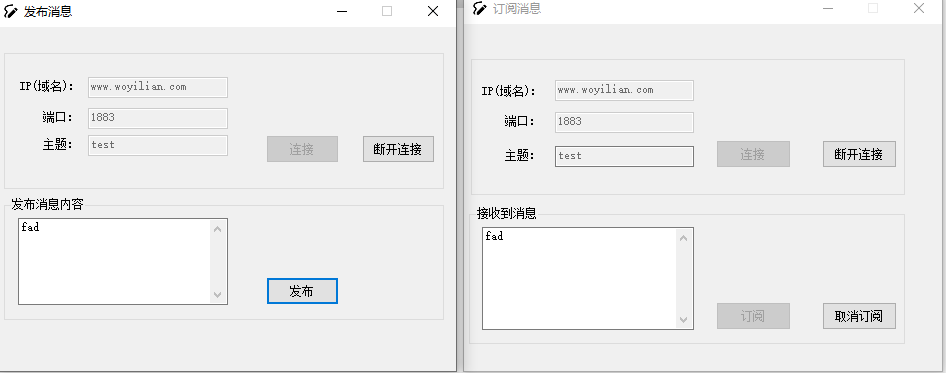
MQTT监听发布工具
用于IORT物联网机器人的调试工具 链接:https://pan.baidu.com/s/1a4u4jto_UatQOGS1n5CAzg 提取码:988v
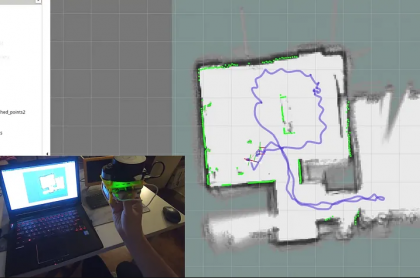
使用 Google Cartographer 和 RPLidar 与 Raspberry Pi 进行机器人SLAM建图
在这个实验中,我将在具有 360 度 LDS RPLidar A1m8 的 Raspberry Pi b3+ 上启动开源 SLAM 软件——Google Cartographer 所有的 SLAM 过程都是在 Raspberry P...

桌面迷你机器人
蓝牙+安卓界面的桌面迷你机器人 使用手机蓝牙发送 指令“1”、“2”、“3”、“4”控制小车前、后、左、右、运动。 安卓手机交互界面; ...
机器人套件
1 蓝牙桌面板迷你三轮机器人套件 使用手机蓝牙发送 指令“1”、“2”、“3”、“4”控制小车前、后、左、右、运动。 2 安卓机器人套件&n...
AI人工智能与机器人的探索和应用1.2
chatgpt的火爆使用让人工智能掀起了新一轮的话题革命。当前的全球情况数据显示,人工智能、机器学习和机器人技术等创新产品几乎每个领域都普遍流行,无论是农业、医疗保健、教育、还是传统汽车、工业,而且这个领域可能很难说完全。人工智能和机...

AI人工智能与机器人的探索和应用1.1
研究机器人和人工智能的技术已有多年了,想来想去,觉得还是有必要对过往的技术做一些凝练和总结。在此过程中,除了能够将知识系统化,构建自己的知识体系框架,还可以以写促学,查漏补缺,形成知识武装的坚强壁垒。 第一章 从生...

旭日X3派编译opencv4.2
1 安装依赖库 sudo apt-get install build-essential git cmake pkg-config -y sudo apt-get install libjpeg8-dev ...

地平线旭日x3派使用自研的机器人分布式开发框架打造机器人
各位看官好 我是《轮式自主移动机器人编程实战》作者李德。很高兴能够领取到旭日x3 pi的开发板,期望这块板子有一段时间了,终于有机会能够上手玩玩。其中这块板子 对我比较大的吸引力是5TOPS的算力和合适的价格,如果适配的好...

easy_mqos 发布imu节点教程
easy_mqOS 是我仿照ROS 搭建的基于MQTT的简易机器人分布式开发框架,是一种轻量级并且十分容易上手的框架,支持多个节点的主题的订阅和单topic发布,节点之间独立、解耦合。没有复杂的文件配置,一定的make编程基础,像正常...