最新资讯

轨迹处理系列:轨迹图形的平移变换算法
机器人会在户外形成一条作业轨迹,该轨迹是根据北斗定位传感器采集的经纬度点,该轨迹是经纬度的集合。 G = [LONGITUDE i,LATITUDE i],i∈(0,n) 现在我们需要对该轨迹的集合进行图形化处理。 ...

python 脚本请求post数据
本文章讲解使用 python 将从服务器post后返回的数据进行解析处理。 包含: python 读取csv文本 ...

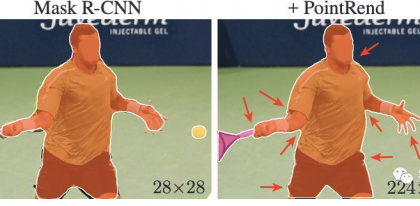
detectron2 maskrcnn检测道路水坑
之前的文章中蹭介绍过使用matterport MASKRCNN 检测道路水坑,为自动驾驶机器人提供道路模型环境。但是检测出来的水坑边缘分界来说不是特别的理想,水坑的边界并没有完全准确的框对,对于要求精度比较高的场合,行驶错误便会进入水...

detectron2入门实测
之前的文章有提到使用 detectron2 实现图像分割的功能,接下来就很快熟悉了下pytorch的环境,然后根据网友的文章搭建环境。 本篇文章结构 搭建环境重点介绍 测试detetron...
matterport MASKRCNN 总结
随着前3篇使用MASKRCNN进行实例分割的例子,对MASKRCNN有一定的初步了解,个人简单对此进行总结 。本章的内容结构为 MASKRCNN 开发特点 MASKRC...
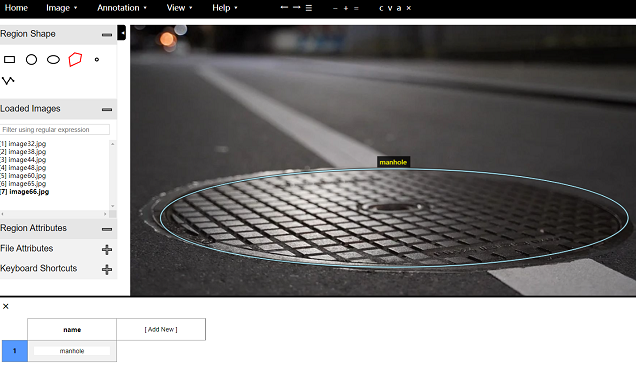
matterport MASKRCNN识别道路井盖
图像分割中有很多好玩的应用场景,接下来就利用 matterport 的MASKRCNN识别道路井盖并标记出mask 蒙版来,然后让机器人在行驶过程中检测井盖, 目前只是觉得将来会有有一定的实用价值,先做出来看看。 ...

matterport MASKRCNN识别水坑
MASKRCNN识别水坑并标记出mask 蒙版来,然后让机器人在行驶过程中避免进入水坑,对于某些特殊场景,专门检测水坑 并避免驶入也是非常重要的。 文章的内容是构建一...

IndexError: index 1080 is out of bounds for axis 1 with size 1080
IndexError: index 1080 is out of bounds for axis 1 with size 1080 问题 解决办法 问题 ...
MASKRCNN 自定义数据集
maskrcnn 是图像分割中支持 实例分割的开源框架,使用MATTERPORT MASKRCNN 很容易上手。 图片集包括训练集和验证集。本篇讲述如何使用VIA 标注工具对数据集进行标注。本文章包括一下内容。 ...

MASKRCNN 识别车辆刮痕
最近迷上了MASKRCNN ,除了电脑训练不给力外,训练出的结果还是可以将就看的。必定训练的数据集还是太少。 mask rcnn在计算机视觉中用于实例分割效果非常震惊,如果数据集足够大的话。计算机视觉可以帮住检测图像中的...

导航数据集
收集的一些跟机器人导航行驶的环境图片数据,包括路面的,积水的,车辆的等,。 1 路面积水数据集 只有10几张,目前免费。 下载链接 链接:https://pan....

数据集
收藏在道路相关的用于图像相关的数据集。 其他训练的数据集等。 1 .气球数据集 大约有70张,形状大小不一,需要裁剪。 ...
Labelme 标注图像转化位灰度图像
在使用语义分割 images-keras-segmentatin 代码的时候,发现训练的标签图像 满足 背景的像素值是1 ,第一个分类的像素值是2 以此类推到255, github 的地址 ...
image-segmentation-keras
image-segmentation-keras 是GitHub上开源的图像语义分割模型框架。 本环境搭建基于 英伟达 T4 的环境使用 tensorflow-gpu 2.4.1 keras.2.3...
MASKRCNN修改display_instances
class_names = ["background",""] demoimg = IMAGE_DIR+"/"+"test1.png" #读取图像skimage.io.imread image =skimage.io.imre...