2.2.3 轿车级的阿克曼转向
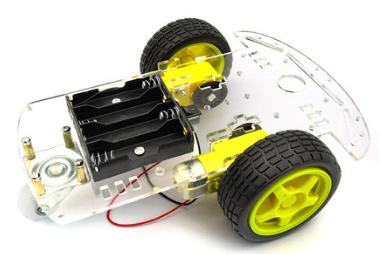
阿克曼是现代轿车中最常用的转向结构,她的特殊结构设计实现了转弯内径的轮子小于转弯外径大的轮胎。是舵机转向的衍化而来。在常用RC车模模型中很多都是这类控制,RC车模需要两个电机就可以,一个驱动后轮(后轮同属一个轴)转动,这样就可以前进,另一个电机控制前边的转向。

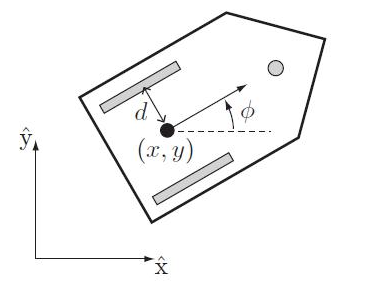
图2-9 舵机转向示意图
图中可以看到半径R1和半径R2是不同的。而在舵机转向中,R1=R2.
阿克曼是现代轿车中最常用的转向结构,她的特殊结构设计实现了转弯内径的轮子小于转弯外径大的轮胎。是舵机转向的衍化而来。在常用RC车模模型中很多都是这类控制,RC车模需要两个电机就可以,一个驱动后轮(后轮同属一个轴)转动,这样就可以前进,另一个电机控制前边的转向。
图2-9 舵机转向示意图
图中可以看到半径R1和半径R2是不同的。而在舵机转向中,R1=R2.