
2.3.2 机器人小车:电机参数计算
上一节说到使用GA370的编码直流减速电机作为机器人智能车的驱动能源具有很大的优势。那究竟什么样子的呢?从下图可以看到减速电机有6根线芯。 分别是电机电源M+,编码器的电源vcc,A和B线,编码器电源地,电机电源GND. ...
2.6 机器人小车的整体方案
本节基于visio画的框图为前提进行讲述。通过图可以看到用树莓派强大的资源可以完成好多事情,在通信方面,支持LAN网,WiFi通信,4G通信,蓝牙通信。利用USB 口转串口可以和外设为串口的设备进行通信,比如和stm32通信完成控制指令...
2.5 机器人小车的大脑:控制器选型
机器人小车的大脑:控制器选型 一些简单的儿童玩具小车基本上都是插上电池打开开关就会跑,他没有避障判断等功能,稍微复杂的加上红外传感器用555定时器和其他集成电路组成循迹小车,但是她也不具备可编程的单片机,儿童载人车...
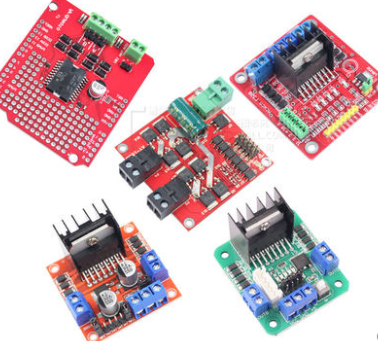
2.4 机器车的驱动方案
2.4 机器人小车的驱动方案 这里的驱动方案是指如何驱动电机按照我们预期的设置让电机进行转动。一般常见的Tb6612驱动模块,mos驱动模块,L293D驱动模块,L298N驱动模块是比较常见的。笔者由于经验问题,并没有每...

2.3 机器人小车驱动电机选型
2.3.1 机器人小车:电机性能 电机是整辆车体的动力来源,驱动能力和负载能力是选型一个重要参数,除此之外,电流电压的取值也很关键。 在之前的章节中我们提到过,电池选用12v电池供电,所以电机的最大电压就只能是12v了。...
2.2.4 机器人小车的转向优缺点
综上,差速转向的转弯半径小很多,并且只要电机转动起来,立马可以得到航向角,而舵机转向需要将传感器安装在舵机结构件上才会知道指令发布后返回的结构,需要特殊的结构设计。转弯半径也相对较大。但是舵机的IO资源利用非常少,很适合四轮双驱的...
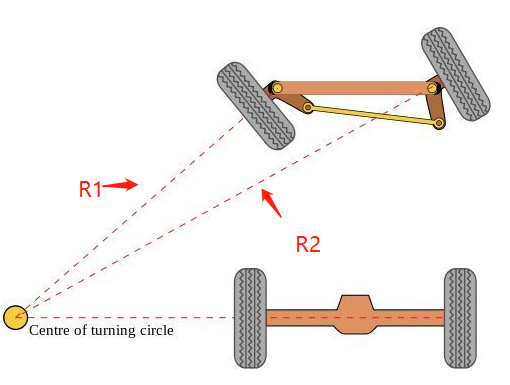
2.2.3 轿车级的阿克曼转向
阿克曼是现代轿车中最常用的转向结构,她的特殊结构设计实现了转弯内径的轮子小于转弯外径大的轮胎。是舵机转向的衍化而来。在常用RC车模模型中很多都是这类控制,RC车模需要两个电机就可以,一个驱动后轮(后轮同属一个轴)转动,这样就可以前进,...