《机器人GPS定位导航小车的制作》-目录
创客:机器人GPS定位导航小车的制作-基于物联网的应用
目录
画册 4
第1章机器人小车基础知识 17
1.1 机器人小车全新认识 17
1.2 机器人小车释疑解惑 17
1.3 机器人小车的驱动方式 18
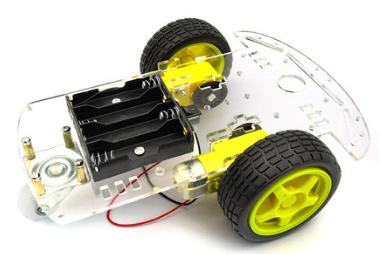
第2章 机器人小车的构成 19
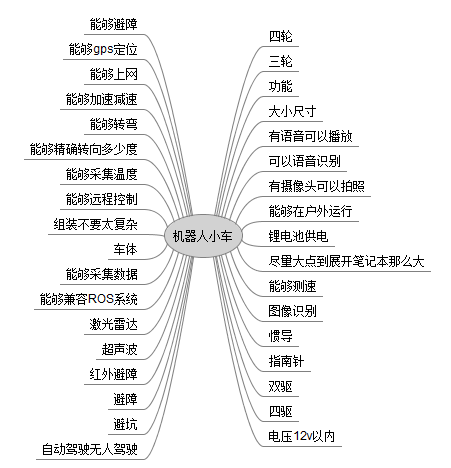
2.1 机器人小车的构想 20
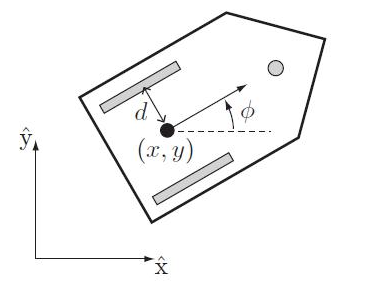
2.2 机器人小车的转向结构 22
2.2.1 机器人小车差速转向 23
2.2.2 机器人小车独立舵机转向 24
2.2.4 机器人小车的转向优缺点 27
2.2.5 机器人小车的底盘设计 28
2.3 机器人小车驱动电机选型 29
2.3.2 机器人小车:电机参数计算 29
2.4 机器人小车的驱动方案 29
2.4.1 驱动模块L298N性能 30
2.4.2驱动模块 L298N使用方法 30
2.5 机器人小车的大脑:控制器选型 31
2.6 机器人小车的整体方案 32
第3章机器人车技术进阶通关证 34
3.1 通行证:C语言基础 34
3.2 通行证:单片机基础 36
3.3通行证: keil编写程序 37
3.4 通行证: Linux操作 38
3.4.1 linux的shell 38
3.4.2 编写程序与脚本 46
3.5 通行证:网络学习 47
3.5.1 基础通信 47
3.5.2 mqtt协议 48
3.6通行证:算法理解 56
3.6.1 控制算法 56
3.6.2 滤波算法 58
3.6.3 卡尔曼滤波 62
第4章 机器人车的从控制器:stm32开发 64
4.1 从控制器的对外神经元:输出pwm 66
4.1.1使用keil模拟输出pwm 66
4.1.2 小车中使用的pwm 69
4.2从控制器的运动神经元: 298N控制 70
4.2.1 本车中298n的连线和固定方式 70
4.2.2 源码解析 70
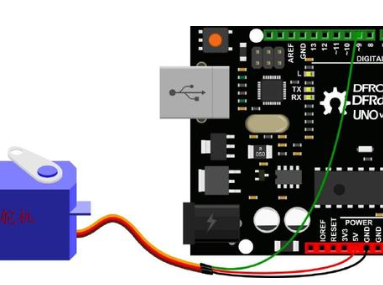
4.3 从控制器的转向神经元:stm32控制舵机 74
4.3.1 舵机介绍及连接方式 74
4.3.2 源码分析 76
4.4 从控制器的感知神经元:stm32超声波测距 77
4.5 从控制器的捕获神经元:pwm捕获测速 81
4.6 从控制器的中枢神经元:串口通信控制指令 86
4.7 从控制器的红外神经元:ADC红外测距 92
4.8 从控制器的交互神经元:stm32的web开发 93
4.8.1 设计方案 93
4.8.2 设计原理 94
4.8.3 关于uip 95
4.8.4 制作html文件 97
第5章 机器人车的主控制器:树莓派开发 98
5.1 认识机器人小车的主控树莓派 98
5.2 主控制器树莓派制作小车的资源 100
5.3 机器人车的交互窗口:树莓派shell 101
5.4 机器人车上网接口:树莓派socket通信 102
5.5机器人主从控制器通信接口:树莓派串口 104
5.5.1 认识USB转串口 104
5.5.2 绑定串口 106
5.6 机器人车无线联网接口:树莓派WiFi 107
5.6.1 树莓派WiFi连接路由器上网 107
5.6.2 树莓派WiFi做热点 109
5.7 机器人车和手机APP通信接口:树莓派蓝牙 110
5.7.1 了解蓝牙 110
5.7.2 使用socket 蓝牙进行通讯 112
5.8 机器人小车野外上网接口:4G模块 114
5.9 机器人小车的指南针:电子磁盘模块开发 116
5.9.1 指南针模块测试记录 116
5.10 机器人GPS定位小车固件 119
第6章 机器人的其他神经元:传感器开发学习 140
6.1 DS18B20温度传感器开发 140
6.2 camera 图像传感器 145
6.3 指南针传感器 145
第7章 机器人实例:GPS定位终端 119
7.1 机器人实体终端:模块构成 119
7.2 机器人主从通信分析:stm32和树莓派通信协议 120
7.3 机器人和云通信分析:树莓派与云TCP通信协议 122
7.4 物联网物与物通信分析:MQTT互通协议 122
6.5 定位机器人组装 123
7.6 定位机器人:配置WiFi 125
7.7 定位机器人调试指南 133
7.7.1 控制主APP:control_engine 133
7.7.2 小车轮速与脉冲对应关系 138
7.8 定位机器人:GPS定位 125
第8章 机器人实例:GPS路径规划 119
8.1 机器人路径规划知识 119
8.2 机器人手动路径规划 120
8.3 机器人自动路径规划 122
8.3.1 时间规划 133
8.3.2 距离规划 138
8.4 机器人算法规划 122
8.7.1 a*算法 133
第9章 机器人实例:GPS定位导航 119
9.1 机器人路径导航知识 119
9.2 机器人路径跟随 120
9.3 机器人自动路径跟随算法 122
9.3.1 时间规划 133
9.3.2 距离规划 138
第10章 机器人的云:物联网云平台 145
10.1 微型服务云平台简介 145
10.2 搭建局域网的Server 146
10.3 阿里云搭建服务器 149
10.3.1 阿里云服务器选型 149
10.3.2 搭建LNMP服务器 151
10.3.3 搭建LAMP服务器 156
10.4 写一个HTML 158
10.5 PHP的MVC架构 158
10.6 JS建立MQTT 158
10.7 部署MQTT Server 158
10.8 建立TCP Server 通信 159
第11章 机器人的云实例:GPS定位云平台 159
11.1最基本的Linux系统方案 159
12.2 云平台功能介绍 160
9.2.1添加设备 163
9.2.2设备信息 164
13.3 路径规划 168
9.3.1 原理 169
9.3.2 流程图 171
第14章 机器人佼佼者:ROS机器人 173
14.1 ROS系统介绍 173
14.2 Ubuntu 16.04安装ROS 182
14.3 发布GPS定位 node 185
14.4 发布IMU node 189
14.5 stm32 通信node 194
14.5.1 设计思路 195
14.5.2 设计实现 196
第15章 机器人系统案例 202
15.1 GPS定位地图显示 202
15.2 GPS路径规划导航行驶 202
15.3 车辆防追尾系统设计 202
15.4 定位防火机器小车 205
附录 207
附录A 写作历程 207
附录B 源码下载链接 207

本书难免会有缺憾,请各位指正。仅售6.99维持该网站运营。谢谢
https://item.taobao.com/item.htm?spm=a213gs.20824378.0.0.42624831AwwC1p&id=643147519177




最新评论
另外我在您这篇资料的淘宝链接里购买了,但还有发货,请问要怎么得到资料。