2.2.4 机器人小车的转向优缺点
综上,差速转向的转弯半径小很多,并且只要电机转动起来,立马可以得到航向角,而舵机转向需要将传感器安装在舵机结构件上才会知道指令发布后返回的结构,需要特殊的结构设计。转弯半径也相对较大。但是舵机的IO资源利用非常少,很适合四轮双驱的车体。
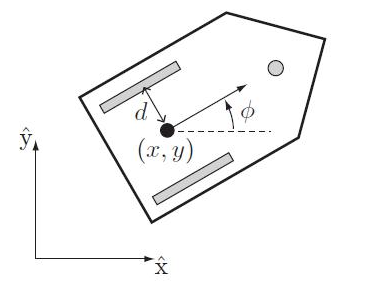
对于差速转向v和w不必同时存在数值。当v=0时 ,w!=0 ,同样可以原地完成转向。
2.2.5 机器人小车的底盘设计
废话了这么多,终于可以聊到这个底盘是如何得来的了。
首先确定我们的底盘是需要什么材质的,这里介绍两种材质,一种是亚克力板,一种是铝合金板,这两个板子的厚度也是不同的,比如亚克力板有3mm,5mm,7mm等。我选用的是亚克力板3mm的主要是便宜,但缺点是薄的板子就会很脆弱。
笔者在使用某快递发货的时候,对方要求组装好,结果就出现了3次亚克力板断裂的情况。所以后期也会用铝板做底盘设计了。
当然不管用什么材质,你得设计出自己想要的尺寸吧,这里就得有一款软件来帮助你了。在结构设计专业中有cad设计图软件,SolidWorks软件,但这些软件好像是收费的,当然也会找到不用收费的。笔者做过硬件,会使用ALtium designer 电路图设计软件,然后我就用这个画了一个二维的外形尺寸图,并把要打的孔位置,孔径大小详细标记出来。这是很不专业的做法。因为没有cad类的画结构软件,幸运的是定制亚克力板的商家还可以看得懂,当然看不懂就打电话联系吧。
定制亚克力板的厂家是在淘宝上搜到的,很多。
板子设计的尺寸是278*202mm,如下图

图2-10 自制小车底盘图纸
说实话,这款设计的还是很low的,没有找专业的指导一下。但是对于我们学习和研究的用途足够了。当然,有认识结构设计的朋友可以一起合作搞一下。这里只是提供这种做事的方法。
这样的外形亚克力板,总共做了10个,合计每块17块钱。
其实,这个板子里边包含了,电机的安装位置,万向轮的安装位置,超声波的安装位置。仅此而已,特别简单。
需要特别注意的是,设计底盘时,一定要对安装的电机尺寸和其他器件了如指掌。在自己的资料库中保存着这些组件的尺寸,安装孔只有对了才能用。
设计底盘如果小于A4纸可以打印出来,然后进行实际比较,这种方法也是可以参考的。
笔者插话:实际板子打样回来后,实际应用中,还想打孔安装别的器件,还会有必要用一个手电钻来打孔直径3mm的。