第1章机器人小车基础知识
创客:机器人GPS定位导航小车的制作-基于物联网的应用
第1章机器人小车基础知识
1.1 机器人小车全新认识
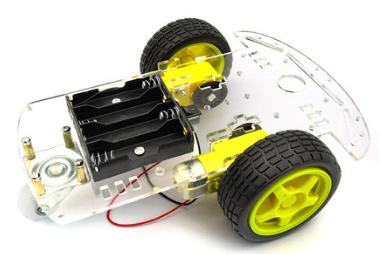
本章为初学者介绍一个最简单的小车由哪些部分构成,从而搭建一个最简单的小车。最简单的小车都是有一个底盘和若干个轮胎通过之间的车轴和螺丝跟底盘固定定在一起。如果单纯是这样的结构,那么小车是没有灵魂的,不能自己前进后退和转向。除此之外,轮胎和底盘之间需要有一个轴来实现轮胎的转动,这个东西称为轴承,如下图:

图1-1 轴承示意图
有了这个轴承,当用力推动车底盘时,轮胎才会转动。机器人小车中的轴承实际上是一个电机马达,只要给一定的电压当有电流流过时电机的轴便会转动以此带动轮胎转动。事实上,电机专业可以学好几年,这里只是通俗易懂的啰嗦几句,讲下原理。接下来干货来了。
有以下几个问题需要搞明白。
1 机器人小车的轮胎是如何被电机驱动的?
2 机器人小车是两个轮胎和轴的关系?
3 如何正反转?
4 如何调速
5 如何走直线
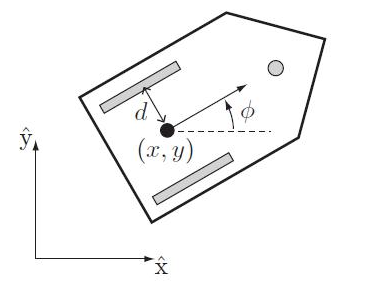
6 如何转弯?转特定角度?
7 Pid调速控制算法?
8 单片机直接控制电机吗?
1.2 机器人小车释疑解惑
针对上一节的问题,笔者进行了大量的搜锁和验证,同时也是笔者在制作小车的过程中实实在在要解决的问题。如果这几个问题可以理解明白,做出一个自己的机器人小车基本没问题了。
针对第一个问题,目前电机和轮胎之间一般都是通过减速齿轮连接的这样的好处可以将扭矩增大,也就是所说的动力会增强。下图中,伸长那一部分就是减速电机,里边就是齿轮。仔细观察会发现,电机的一端会有安装孔,这些孔是可以安装到车体上面去的。

图1-2 带减速器的电机
针对第二个问题,两个轮胎之间如果不用电机驱动,就是我们常说的四驱。两驱的话可以考虑用三轮搭建。如果非要四轮的话可以实现并联。
针对第三个问题,这个跟电机有关了,我们上边讨论的都是直流无刷电机,一般两根线就可以驱动,假如说我们定义两根线分别为A和B线,当A接上电源正极时,B接电源负极时为正转。反之,A 接电源负极时,B接电源正极则会反转。
针对第四个问题,如何调速也是跟电机特性有关,当电机朝某一个方向转动时,加载电极上的电压越来越大时,速度会越来越大,后边会讲到用pwm的方法实现调速。
另外关于如何实现转向,后期在实际应用中会逐步介绍。
说到这里简单普及一下电机的知识。