2.2 机器人小车的转向结构
创客:机器人GPS定位导航小车的制作-基于物联网的应用
2.2 机器人小车的转向结构
在上一节我们看到我们最终选用双驱三轮驱动结构,为什么采用双驱三轮结构?其中两个轮子是减速驱动轮,也就是通过一定的齿轮结构和电机马达连接,这两个驱动轮并排,也可以理解成在同一个轴上,外形跟我们生活中遇到的三轮车相似,但我们设计的两只驱动轮并非连接在一个轴上。
下图是我在某宝上搜索的智能小车底盘,可以看到,两个黄色的电机并非连接到同一个轴上。这里就出现了,那么这种车是如何实现转弯呢?

图2-3 小车底盘
2.2.1 机器人小车差速转向
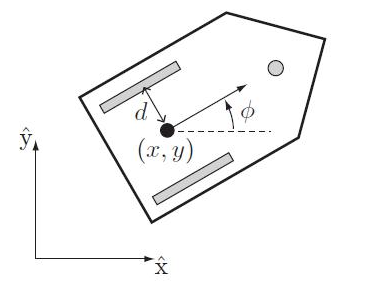
当两个轮胎的转动速度不同时,便可以实现转向。

图2-4 转弯动作示意图
如上图,当A和B轮分别按照上图的箭头方向转动时便实现了右转弯的动作。
这种结构很容易实现转弯,但是确实很难实现走直线?为什么?因为每个电机马达的参数在生产过程中因材质的特殊因素而造成,这个道理就好比天下没有一模一样的叶子一样。所以即使用同样的电压驱动两个电机,两只电机在转速上也并非是一模一样的,这个可以通过让小车一直走,走的远了你会发现所走的路线实际上是有半径的。

图2-5 示意图
这个问题怎么解决,只有引入闭环控制,即找到参照物,根据与参照物的偏差进行修正,从而保证小车走直线。在自动控制专业中,有一个算法叫PID算法,这个能使采样速度和设置速度无限接近。
目前坦克上用的都是差速转向。





最新评论