最新资讯

rockpi s 使用usb 摄像头
Update kernel to version 4.4.143-41-rockchip or newer. 烧录的镜像内核版本必须是4.4.143-42 及以上。 radxa 提供的最新镜像下载地址在这里 ...
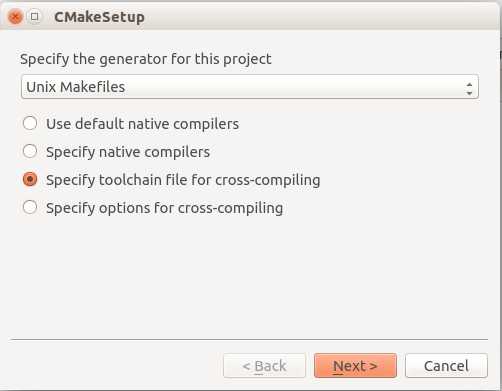
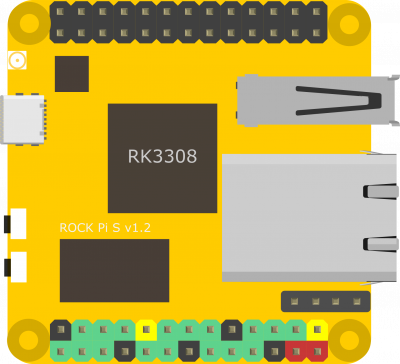
rock pi s的opencv 交叉编译
rock pi s是 4核 A35 rk3308的硬件处理器,小巧精致。最新的Ubuntu版本支持video 了。 使用的编译器是 aarch64-limux-gnu- 64位的gcc交叉编译工具链。 ...
解决ROCKPI s shell tab无法补全等问题
尝试用rock pi s作为机器人主控完成一些简单的任务,于是研究一下。 rockpi s 升级后,发现方向键和tab键无法补全,经过查找 shell 无法定位到 bash ls -l /bin/sh ...
树莓派GY906测试代码
这里用的sda.1 scl.1 3和5管脚,经过测试响应时间还是挺快的,从27度跳到35度ms级别。 //gcc mlx90614.c -o mlx90614 -l bcm2835 #include <stdio.h> ...
linux/android 添加ch341 ttyUSB转串口module的标准添加过程 apq8053 rk3399
以高通apq8053的处理器为例子说明 在kernel的路径下 一般的配置都在 arch 下 根据架构选择不同的目录。 ls arch/ alpha arc arm arm64 avr32 blackfin...
寻找合作
开放合作,寻求互补,利益共享! 能看到这个页面的80%的是靠缘分,我们非常需要这样的缘分,我们深知寻找一位志同道合的合作伙伴 的千辛万苦和不容易。 我们在这里不阐明具体的职位,但无非是在机器人终...
树莓派使用蓝牙的所有方法总结都写在这里了
本总结中提供了bluetoothctl 和hciconfig 以及rfcomm的server的使用开发等,对树莓派以及类似Ubuntu 等其他的Linux支持蓝牙的系统做总结。 具有一定的实际参考和利用价值。前两个适合手动测试,...
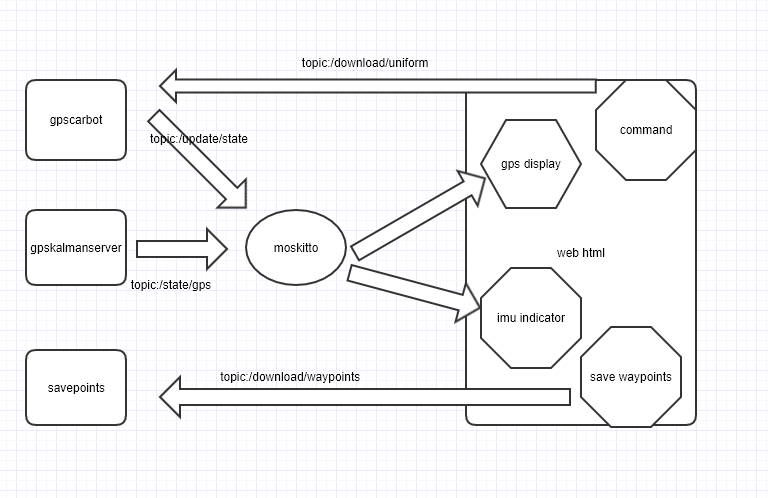
12-GPS室外定位导航车topic 浏览图
这张图比较全面的说明了topic之间的订阅与发布信息,借助ros的设计概念。 topic /download/uniform /update/state /state/gps /do...
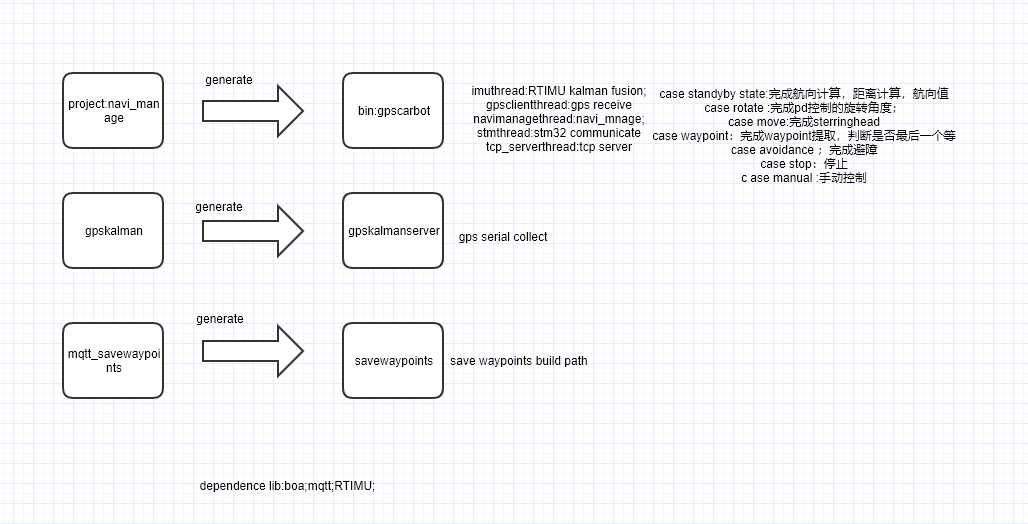
11-GPS室外定位导航车进程线程关系表
这里还是看扎张图 以方便理解
10-GPS室外定位导航车树莓派navi开发
case standyby state:完成航向计算,距离计算,航向值 case rotate :完成pd控制的旋转角度; case move:完成sterringhead case waypoint:完成waypoint提取,判断是否最后...
9-GPS室外定位导航车树莓派卡尔曼滤波程序开发
程序为独立的进程,工程名为 GPS_KALMAN ,没有融合IMU.(下一步将会融合imu )提高定位精度。 生成的二进制可执行文件为 gpscarbotserver 通过gps/state 发布到...
8-GPS室外定位导航车树莓派waypoint接收程序开发
这里使用mqtt 接收cjson 键值对,然后保存为文本。 该程序为独立进程,工程名为 mqtt_waypoints 生成的可执行文件为 waypoints waypoints.data 会被覆盖,不会累加 。 路径在...

7-GPS室外定位导航车规划航点waypoint 和下发
请务必将智能车放到室外或者gps 信号比较好的能够定位的情况下再操作。 能够定位之后,断开智能车,鼠标右键单击5个航电waypoints 如果出错可以清空重新规划, 规划完成后,单击保存既可以下发到车辆中。 ...
6-GPS室外定位导航车仪器指示表显示
这里使用的开源方案 为 flight-indicator . github为 https://github.com/horo2016/jean-flight-indicator 提供支持航...
5-GPS室外定位导航车的web mqtt完成通信
这里给出的方案是使用paho_mqtt.js 和mqttws31.js 实现。 html中调用标准库 api 接口实现 。通信使用 cJson 格式 键值对 。 例如 lonti:112...