最新资讯
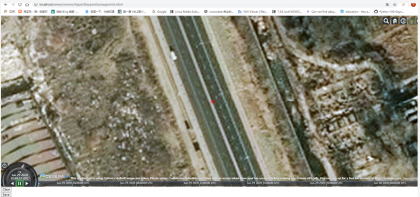
4-GPS室外定位导航车BOA服务器搭建百度地图和必应地图
地图调用的方案国内选择的是百度,也可以用高德。国外选用的时必应地图。必应地图有点大,打开的时候反应很慢,这里的教程 只是嵌入到了树莓派中,实际中用的还是百度地图。读者如果感兴趣可以在必应地图中进行开发。 必应地...

3-GPS室外定位导航车和底盘通信接口
单片机往外发送的接口 在rosNodeNom.c void dataPackSend(void) { com_x_send_data.x_pos.fv = p...
2-GPS室外定位导航车定位车树莓派环境搭建
如果你想重新搭建环境,从一张空白的sd卡开始的话,您将这样做。 第一步 下载树莓派最新镜像 strech image。使用树莓派3B 说明; 第二步 使用win32diskimager 将系统ima...

1-GPS室外定位导航车定位车底盘开发
有关地盘开发的相关可以先看这两篇了解 用最低成本搭建小车底盘stm32 &nb...
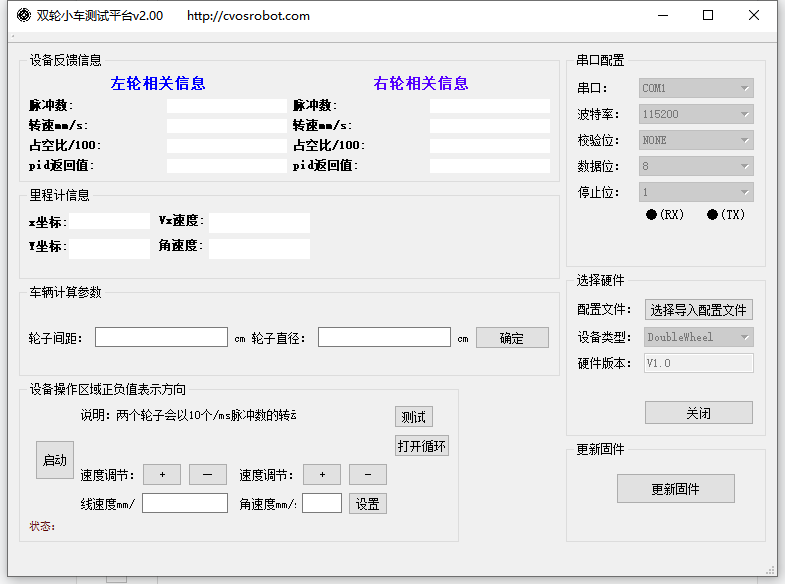
机器人车底盘驱动电机硬件测试小工具doublewheelv2.0
机器人车底盘驱动电机硬件测试小工具doublewheelv2.0 支持测试本店开发的双轮驱动板,有以下特色 可监听双轮的脉冲数; 可监听双轮的转速; ...
机器人车旋转特定角度的方法二
上一篇文章介绍了旋转的特定角度,想尝试在没有任何障碍物的广场中旋转角度的最优方向,用到概率仿真的算法。 得到最优旋转方向。 #include <time.h> #include <sys/time.h&...
机器人车旋转特定角度的方法
本方法结和IMU和里程计底盘实现。imu采集的heading范围需要在0-360之间变化,如果是0-180,-180-0最好转换为0-360方便计算。 如下程序为仿真,flg的值决定了小车左右转弯的方向。 arg1 是初始h...
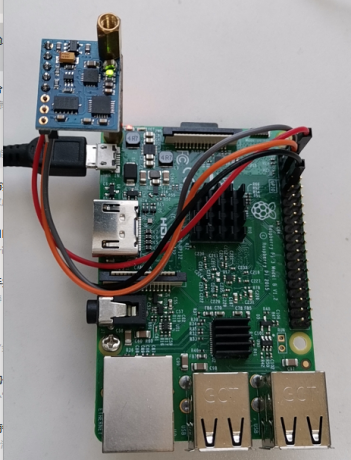
RTIMULIB库在树莓派上的使用
RTIMULib2是一种将9自由度、10自由度或11自由度IMU连接到嵌入式Linux系统并获取RTQF或Kalman滤波四元数或Euler角位姿数据的简单方法。基本上,集成RTIMULib2只需要两个简单的函数调用(IMUInit()...
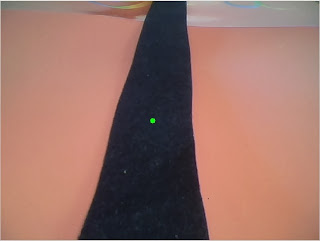
树莓派opencv python 实例教程三 黑线路径跟随机器人
该机器人具有一项新功能,可以沿着地板上的黑线绘制。 我创建了一个带有行的新符号,当机器人读取该符号时,它将开始以下过程。 怎么运行的 实际上,行跟随功能是以非常简单的方式实现的。因为该线...
树莓派opencv python 实例教程二 手势识别 Hand Gesture Recognition
调整屏幕亮度会改变结果。尽量将手完全放在盒子里,避免手臂或手腕进入盒子(因为它会改变面积比)。使用范围值完成,因此可能适用于不同的人的不同颜色范围。 ...
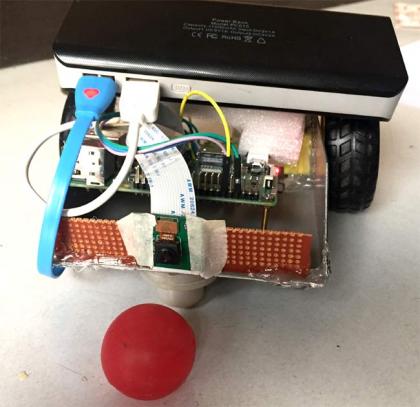
树莓派opencv python 实例教程一 颜色圆球跟踪机器人教程
人工智能和机器学习领域的发展日新月异,必将在不久的将来改变人类的生活方式。人们认为机器人可以通过传感器和机器学习处理来理解现实世界并与之互动。就像我们一样,图像识别是一种流行的方式,人们认为机器人可以通过使用摄像头观察现实世...
usb camera yuyv(yuv422)转换成yuv420
/* * V4L2 video capture example * * This program can be used and distributed without restrictions. */ #incl...

概率机器人
终于拿到概率机器人这本书了,2019年第5次印刷的。 概率机器人分为4部分17章。内容比较全面,适合研究机器人的一些概念和算法。 第一部分是基础知识 第一章到第六章 第一章是绪论,主要讲述了概...
基于coreslam的2d-slam建图无需ros 的说明全网总结
slam 建图当前最流行的是基于ROS平台的gmapping ,cartographer等,ros平台相对庞大,roslaunch rosrun 指令操作复杂。 对于研究者有大把时间的人可以放开了去学习。本文介...

breezyslam建图2d-slam建图测试一
这篇文章是基于breezyslam 建图的后续,对breezyslam的建图进行测试, 使用树莓派3B+思兰激光雷达, 使用Python的所有库,所有库的安装和记录请查看这篇文章 教程四:树莓派搭建...