最新资讯
2.5 机器人小车的大脑:控制器选型
机器人小车的大脑:控制器选型 一些简单的儿童玩具小车基本上都是插上电池打开开关就会跑,他没有避障判断等功能,稍微复杂的加上红外传感器用555定时器和其他集成电路组成循迹小车,但是她也不具备可编程的单片机,儿童载人车...
2.4 机器车的驱动方案
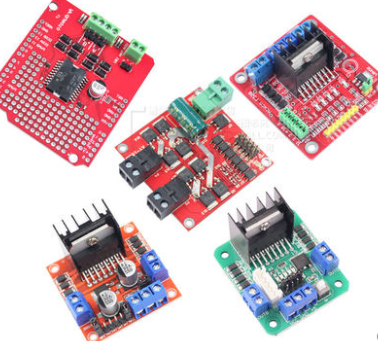
2.4 机器人小车的驱动方案 这里的驱动方案是指如何驱动电机按照我们预期的设置让电机进行转动。一般常见的Tb6612驱动模块,mos驱动模块,L293D驱动模块,L298N驱动模块是比较常见的。笔者由于经验问题,并没有每...

2.3 机器人小车驱动电机选型
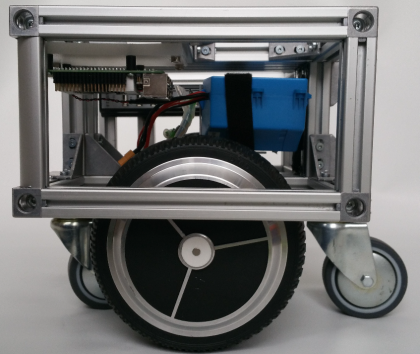
2.3.1 机器人小车:电机性能 电机是整辆车体的动力来源,驱动能力和负载能力是选型一个重要参数,除此之外,电流电压的取值也很关键。 在之前的章节中我们提到过,电池选用12v电池供电,所以电机的最大电压就只能是12v了。...
2.2.4 机器人小车的转向优缺点
综上,差速转向的转弯半径小很多,并且只要电机转动起来,立马可以得到航向角,而舵机转向需要将传感器安装在舵机结构件上才会知道指令发布后返回的结构,需要特殊的结构设计。转弯半径也相对较大。但是舵机的IO资源利用非常少,很适合四轮双驱的...
2.2.3 轿车级的阿克曼转向
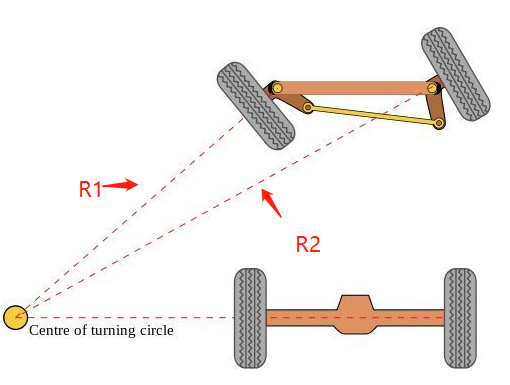
阿克曼是现代轿车中最常用的转向结构,她的特殊结构设计实现了转弯内径的轮子小于转弯外径大的轮胎。是舵机转向的衍化而来。在常用RC车模模型中很多都是这类控制,RC车模需要两个电机就可以,一个驱动后轮(后轮同属一个轴)转动,这样就可以前进,...
2.2.2 机器人小车独立舵机转向
独立舵机转向是依靠一个舵机实现转向,该舵机安装在两个轮子中间,轮子不需要再安装驱动电机。 &nbs...
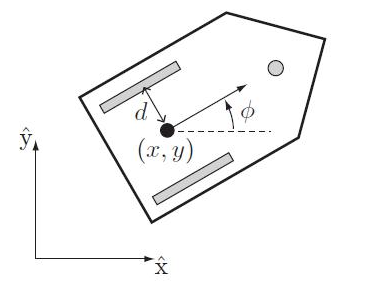
2.2 车辆模型建立-两轮差速模型ros
这里补充一节关于数学模型建立的相关内容,以方便后续运动学用公式推算。 这里以差速的模型进行说明 首先建立笛卡尔坐标系。水平为x 轴。 小车的左右轮半径可以通过霍尔编码得...
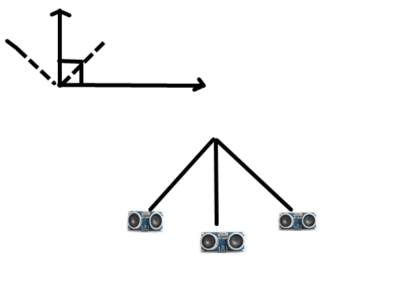
三面超声波测距及坐标位置转换
打算使用三个超声波测距避障模块部署到机器人智能车上,之间间隔45度角。以笛卡尔坐标系为基准,可以根据每个测出的距离 求出所对应的障碍物的位置。假设车头面向正前方,theta = 90度,那么根据三角函数可求出左右障碍物的位...
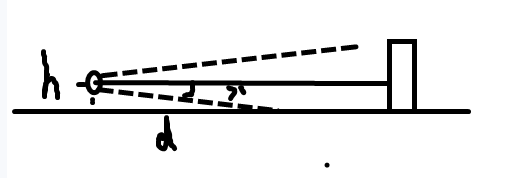
超声波模块hcsr04 固定高度的研究
hcsr04通常作为测距避障模块固定在机器人智能车的车体上。但是固定多高才是最佳的高度呢? 现在对超声波避障模块做以下简单的说明。 一般HCSR04的扫描角度商家给出的为15度,当我们水平放置的时候实际水平角度...
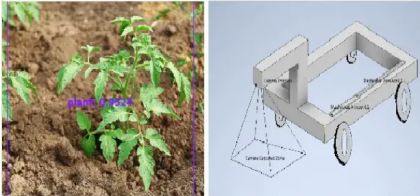
自动除草机器人系统改装制作
机器人车技发网分享一个外国的牛人们创建的一个低功率的,基于FPGA硬件的农业的农业机器人平台,用于从野外检测和清除杂草的项目。 该项目借助机器视觉和神经...

dwa算法 python版本
""" version1.1 Mobile robot motion planning sample with Dynamic Window Approach 结合https://blog.csdn.net/heyijia0327/a...
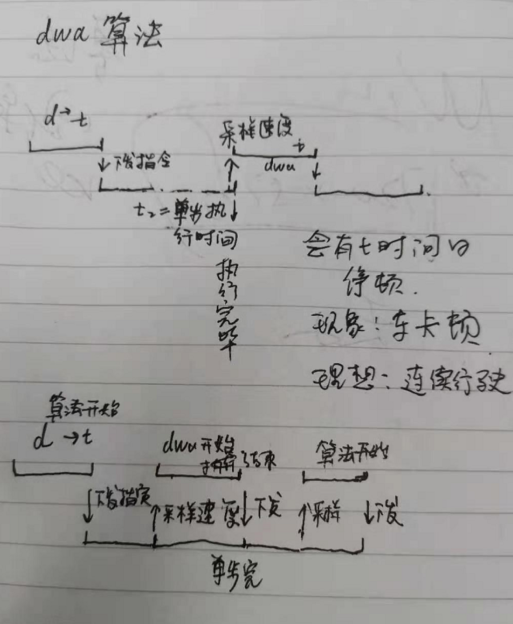
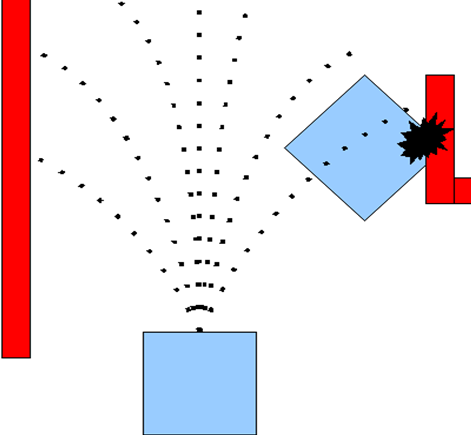
dwa 避障算法的若干理解
前言 根据ros中 base_local_planner 和dwa_local_planner代码的理解。 https://github.com/ros-planning/navigation d...
动态窗口算法运动计划
大多数机器人都有一套用于运动计划的导航算法,这些算法以不同的频率执行,全局路径规划器(例如A *,〜0.1 Hz),中级路径变形(例如弹性带,〜5Hz)以及碰撞/避障算法(〜20Hz),这是执行器控制之前的最后一步。 对于MAGIC 20...
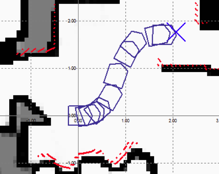
算法学习之DWA局部路径规划算法
DWA算法是近日工作中常用到的算法,在此分享一下。 DWA算法又名动态窗口法,其原理较为简单,属于局部路径规划算法,常用于局部避障. 简单介绍一下算法流程: 根据车体模型不同,DWA...
机器人车的论坛自动驾驶的论坛
机器人车的论坛 http://cvosrobot.com/forum/ 机器人车的论坛自动驾驶的论坛 机器人车技发网为自动驾驶而生。 机器人车的论坛自动驾驶的论坛。 目前三轮...