
实战|基于园区道路和机器视觉方案的自动驾驶机器人实战(上)
https://mp.weixin.qq.com/s/LHj8qq9iWPc_9z5wyfXVSQ 原创 小vDiy 视觉动力机器人 2023-02-27 11:52 发表于北京...
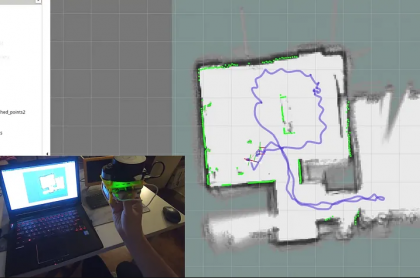
使用 Google Cartographer 和 RPLidar 与 Raspberry Pi 进行机器人SLAM建图
在这个实验中,我将在具有 360 度 LDS RPLidar A1m8 的 Raspberry Pi b3+ 上启动开源 SLAM 软件——Google Cartographer 所有的 SLAM 过程都是在 Raspberry P...

桌面迷你机器人
蓝牙+安卓界面的桌面迷你机器人 使用手机蓝牙发送 指令“1”、“2”、“3”、“4”控制小车前、后、左、右、运动。 安卓手机交互界面; ...
机器人套件
1 蓝牙桌面板迷你三轮机器人套件 使用手机蓝牙发送 指令“1”、“2”、“3”、“4”控制小车前、后、左、右、运动。 2 安卓机器人套件&n...
AI人工智能与机器人的探索和应用1.2
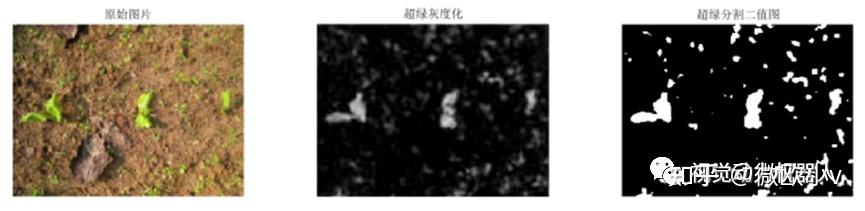
chatgpt的火爆使用让人工智能掀起了新一轮的话题革命。当前的全球情况数据显示,人工智能、机器学习和机器人技术等创新产品几乎每个领域都普遍流行,无论是农业、医疗保健、教育、还是传统汽车、工业,而且这个领域可能很难说完全。人工智能和机...

AI人工智能与机器人的探索和应用1.1
研究机器人和人工智能的技术已有多年了,想来想去,觉得还是有必要对过往的技术做一些凝练和总结。在此过程中,除了能够将知识系统化,构建自己的知识体系框架,还可以以写促学,查漏补缺,形成知识武装的坚强壁垒。 第一章 从生...

地平线旭日x3派使用自研的机器人分布式开发框架打造机器人
各位看官好 我是《轮式自主移动机器人编程实战》作者李德。很高兴能够领取到旭日x3 pi的开发板,期望这块板子有一段时间了,终于有机会能够上手玩玩。其中这块板子 对我比较大的吸引力是5TOPS的算力和合适的价格,如果适配的好...

easy_mqos 发布imu节点教程
easy_mqOS 是我仿照ROS 搭建的基于MQTT的简易机器人分布式开发框架,是一种轻量级并且十分容易上手的框架,支持多个节点的主题的订阅和单topic发布,节点之间独立、解耦合。没有复杂的文件配置,一定的make编程基础,像正常...

关于书中PWM设置的具体说明
int main(void) { Stm32_Clock_Init(9); //系统时钟设置 delay_init(72); ...

开源路径规划与定位显示的方法和步骤
本文档包含以下内容: 1手动规划路径 2 路径信息接收 3 GPS定位发送 4 定位显示 1 手动规划路径 请先注册并登录网站 http://www....
轨迹处理系列:轨迹中寻找波峰波谷
在角度轨迹中寻找角度最大的值,即为第一个波峰或者第一个波谷,笛卡尔坐标系中,通过atan2获取的角度最大并不一定是在拐弯,直线上的轻微抖动都会形成一个类似拐弯的角度,比如行驶的角度为 【160°,162°,167°,170...
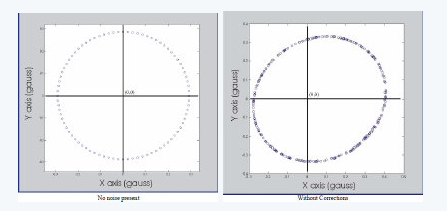
RTIMUlib是如何实现地磁计校准的代码解析
在RTimu.cpp中实现了地磁计的校准,包括偏置和比例系数。偏置量为静态下的零点漂移,比例系数让地磁数据有椭圆变得更圆。 正常情况下,将地磁计绕某轴旋转一轴,产生的地磁数据是一个圆形,上图中左侧为绕z轴一轴,由x.y的数...
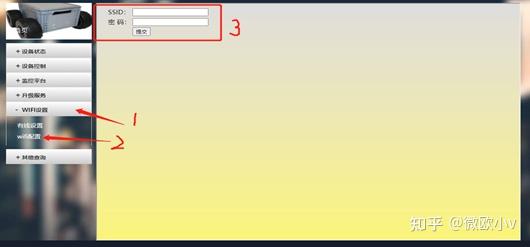
远程控制机器人车的三种玩法
配网阶段 1、 USB wifi模块的网络请根据商家提供的说明进行实名认证和配置 2、 树莓派机器人的配网 初次使用,需要配置好WiFi的名称和密码,以便机器人上网需求。 步骤: ...

轨迹跟踪比例P的实现move2pose
通过对当前航点到目标点的距离比例关系转换成速度。v = kp*s ,距离s越大 v越大,反之越小。随着距离的拉近速度变小为0.导致速度不够平滑。 会有快慢快慢的问题出现。连续点的时候需要进行优化。 目标角度对当...
ROS中的Tracking PID算法
在ROS的源码中给出了Tracking PID的控制算法,该算法可以用来精确的动态的跟踪轨迹。 在 nav_msgs/Path 中可以动态的插入一个目标点,然后进行速度调节,用来达到预期,以此循环这样的多个节点。...