
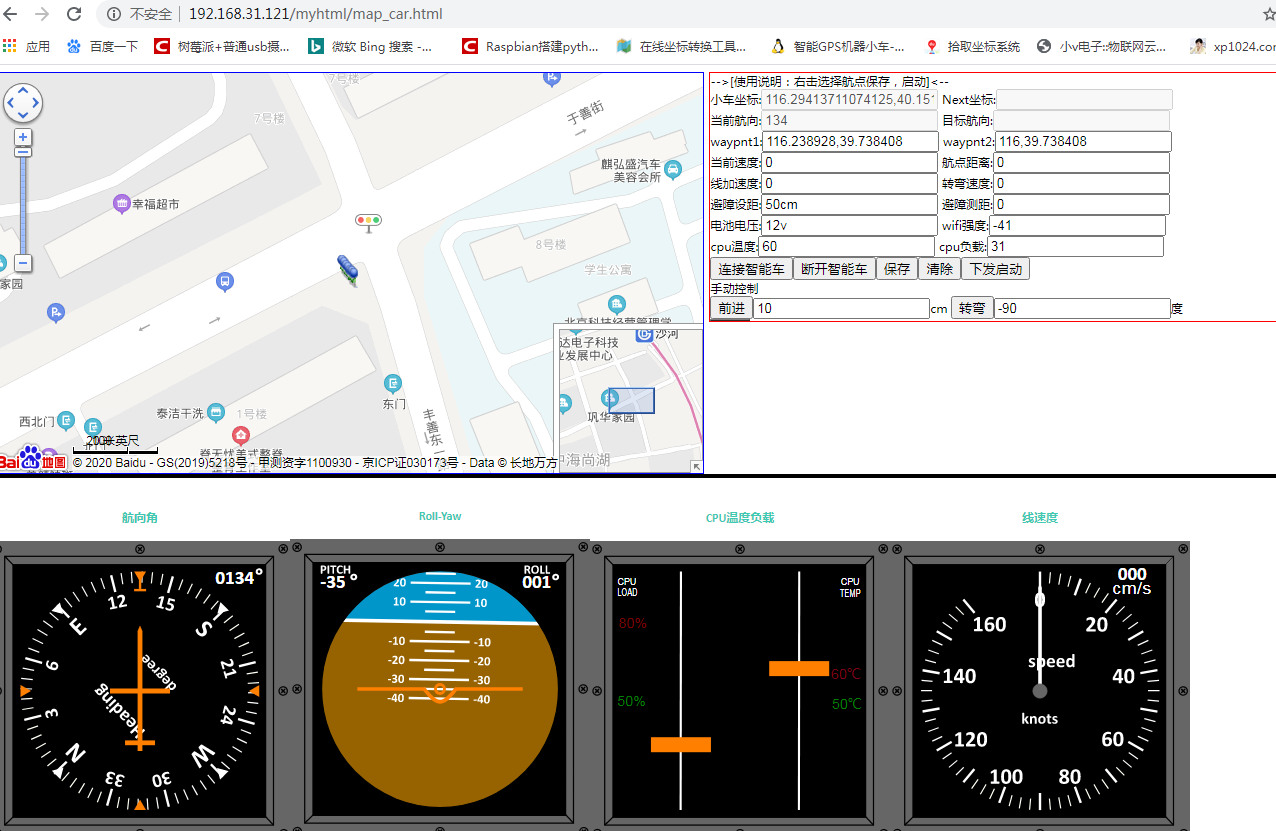
6-GPS室外定位导航车仪器指示表显示
这里使用的开源方案 为 flight-indicator . github为 https://github.com/horo2016/jean-flight-indicator 提供支持航...
5-GPS室外定位导航车的web mqtt完成通信
这里给出的方案是使用paho_mqtt.js 和mqttws31.js 实现。 html中调用标准库 api 接口实现 。通信使用 cJson 格式 键值对 。 例如 lonti:112...
4-GPS室外定位导航车BOA服务器搭建百度地图和必应地图
地图调用的方案国内选择的是百度,也可以用高德。国外选用的时必应地图。必应地图有点大,打开的时候反应很慢,这里的教程 只是嵌入到了树莓派中,实际中用的还是百度地图。读者如果感兴趣可以在必应地图中进行开发。 必应地...
3-GPS室外定位导航车和底盘通信接口
单片机往外发送的接口 在rosNodeNom.c void dataPackSend(void) { com_x_send_data.x_pos.fv = p...
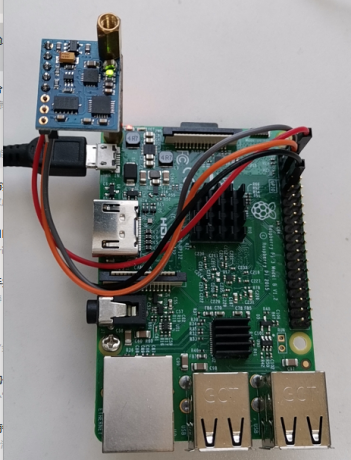
2-GPS室外定位导航车定位车树莓派环境搭建
如果你想重新搭建环境,从一张空白的sd卡开始的话,您将这样做。 第一步 下载树莓派最新镜像 strech image。使用树莓派3B 说明; 第二步 使用win32diskimager 将系统ima...

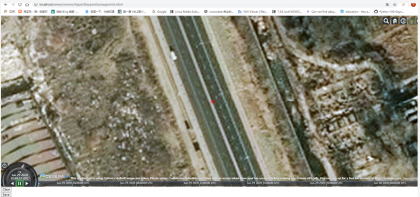
1-GPS室外定位导航车定位车底盘开发
有关地盘开发的相关可以先看这两篇了解 用最低成本搭建小车底盘stm32 &nb...
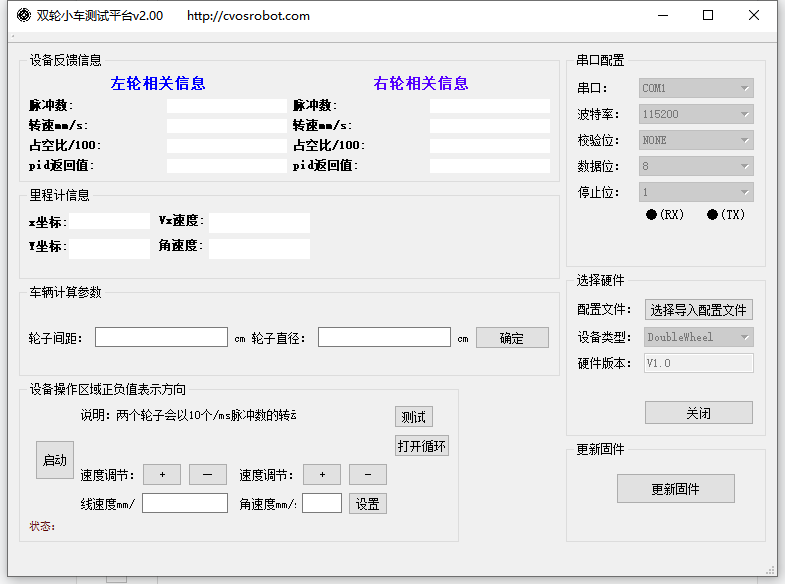
机器人车底盘驱动电机硬件测试小工具doublewheelv2.0
机器人车底盘驱动电机硬件测试小工具doublewheelv2.0 支持测试本店开发的双轮驱动板,有以下特色 可监听双轮的脉冲数; 可监听双轮的转速; ...
 置顶推荐
置顶推荐 GPS定位导航室外定位导航车开发说明教程,想去哪里点哪里!
最近会更新如下教程,欢迎跟进。智能小车 GPS导航车,gps定位导航车 &nb...
机器人车旋转特定角度的方法二
上一篇文章介绍了旋转的特定角度,想尝试在没有任何障碍物的广场中旋转角度的最优方向,用到概率仿真的算法。 得到最优旋转方向。 #include <time.h> #include <sys/time.h&...
机器人车旋转特定角度的方法
本方法结和IMU和里程计底盘实现。imu采集的heading范围需要在0-360之间变化,如果是0-180,-180-0最好转换为0-360方便计算。 如下程序为仿真,flg的值决定了小车左右转弯的方向。 arg1 是初始h...
RTIMULIB库在树莓派上的使用
RTIMULib2是一种将9自由度、10自由度或11自由度IMU连接到嵌入式Linux系统并获取RTQF或Kalman滤波四元数或Euler角位姿数据的简单方法。基本上,集成RTIMULib2只需要两个简单的函数调用(IMUInit()...

概率机器人
终于拿到概率机器人这本书了,2019年第5次印刷的。 概率机器人分为4部分17章。内容比较全面,适合研究机器人的一些概念和算法。 第一部分是基础知识 第一章到第六章 第一章是绪论,主要讲述了概...
基于coreslam的2d-slam建图无需ros 的说明全网总结
slam 建图当前最流行的是基于ROS平台的gmapping ,cartographer等,ros平台相对庞大,roslaunch rosrun 指令操作复杂。 对于研究者有大把时间的人可以放开了去学习。本文介...

breezyslam建图2d-slam建图测试一
这篇文章是基于breezyslam 建图的后续,对breezyslam的建图进行测试, 使用树莓派3B+思兰激光雷达, 使用Python的所有库,所有库的安装和记录请查看这篇文章 教程四:树莓派搭建...

二、自主移动机器人智能车使用python版本的breezyslam 进行测试
正如我在上一篇文章中提到的那样,自动机器人定位有两个基本步骤:本地建图和行动控制。机器人需要知道它在哪里,然后相应地移动。重复一遍。在已知的环境中(例如,如果您有实验室的地图),本地建图可能会更容易,但是在现实世界中,车辆很可能会在未...