
旭日X3派编译opencv4.2
1 安装依赖库 sudo apt-get install build-essential git cmake pkg-config -y sudo apt-get install libjpeg8-dev ...

地平线旭日x3派使用自研的机器人分布式开发框架打造机器人
各位看官好 我是《轮式自主移动机器人编程实战》作者李德。很高兴能够领取到旭日x3 pi的开发板,期望这块板子有一段时间了,终于有机会能够上手玩玩。其中这块板子 对我比较大的吸引力是5TOPS的算力和合适的价格,如果适配的好...

easy_mqos 发布imu节点教程
easy_mqOS 是我仿照ROS 搭建的基于MQTT的简易机器人分布式开发框架,是一种轻量级并且十分容易上手的框架,支持多个节点的主题的订阅和单topic发布,节点之间独立、解耦合。没有复杂的文件配置,一定的make编程基础,像正常...

ubuntu 自定义编译OPENCV版本Python配置路径的问题
在nvidia jetson nano的开发板中,编译opencv4.2 cuda 版本, 4.2的版本中DNN模块已经支持nvidia的GPU了。所以安装4.2版本使用DNN深度学习。 在本教程的其余部分中...

[enforce fail at CPUAllocator.cpp
在32核CPU服务器上跑推理程序,结果遇到内存无法分配问题,看到别人的回答说GPU上没遇到过。这是pytorch 在CPU服务器上的兼容性问题。
关于书中PWM设置的具体说明
int main(void) { Stm32_Clock_Init(9); //系统时钟设置 delay_init(72); ...
自己动手写一套2D的SLAM算法(2)
上一节提到根据 OPENCV mat的图像像素值来判断雷达数据是否和图像的像素值一样进行匹配,试验可知,像素匹配方法精确度不是很高,并且还需要从Mat 中读取像素值,在树莓派上运行时速度受限。所以考虑直接从数组读取,并优化匹配方案。 ...

自己动手写一套2D的SLAM算法(1)
需要利用到OpenCv的图像库函数,用到二值贝叶斯知识,粒子滤波。 想自己写一套SLAM算法并能在一些低端4核处理器上运行,并最终商业化是我的初衷。 通过查看各种论文发现,可以尽快实现的使用得分地图来确定机器人...
Linux下获取路径文件夹所有的文件
void GetFileNames(string path,vector<string>& filenames) { DIR *pDir; struct di...

开源路径规划与定位显示的方法和步骤
本文档包含以下内容: 1手动规划路径 2 路径信息接收 3 GPS定位发送 4 定位显示 1 手动规划路径 请先注册并登录网站 http://www....
sdp vlc书写格式
m=video 7078 RTP/AVP 96 a=rtpmap:96 H264 a=framerate:10 a=decode_buf=100 c=IN IP4 192.168.0.2...
轨迹处理系列:轨迹中寻找波峰波谷
在角度轨迹中寻找角度最大的值,即为第一个波峰或者第一个波谷,笛卡尔坐标系中,通过atan2获取的角度最大并不一定是在拐弯,直线上的轻微抖动都会形成一个类似拐弯的角度,比如行驶的角度为 【160°,162°,167°,170...
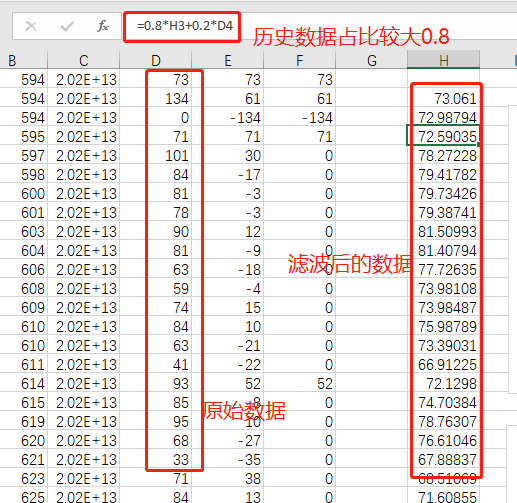
轨迹处理系列:低通滤波在GPS信号上的处理
手上有一批GPS轨迹,已经求得两点之间的角度,但由于GPS轨迹没有经过滤波,得到的GPS轨迹两点之间的角度浮动太大, 使用经典的低通滤波可以将频繁出现的高频信号过滤掉,上一数据所占比重为0。8 本节信息比重...
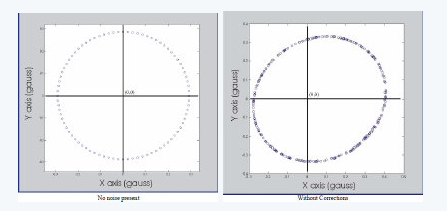
RTIMUlib是如何实现地磁计校准的代码解析
在RTimu.cpp中实现了地磁计的校准,包括偏置和比例系数。偏置量为静态下的零点漂移,比例系数让地磁数据有椭圆变得更圆。 正常情况下,将地磁计绕某轴旋转一轴,产生的地磁数据是一个圆形,上图中左侧为绕z轴一轴,由x.y的数...
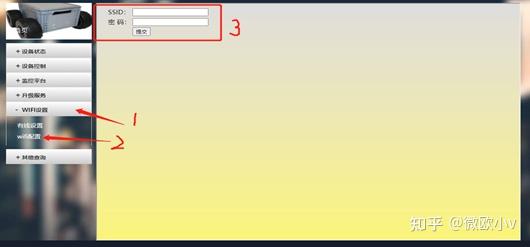
远程控制机器人车的三种玩法
配网阶段 1、 USB wifi模块的网络请根据商家提供的说明进行实名认证和配置 2、 树莓派机器人的配网 初次使用,需要配置好WiFi的名称和密码,以便机器人上网需求。 步骤: ...