
IndexError: boolean index did not match indexed array along dimension 0; dimension is 0 but corresponding boolean dimension is 1
使用MASK-rcnn训练样本时发现这个问题。 重点解决一下问题: 维度类和标签不匹配,比如2各类 1+2,但是代码写了1+1 其次所有的 “shapes‘的类名要保持一致; ...
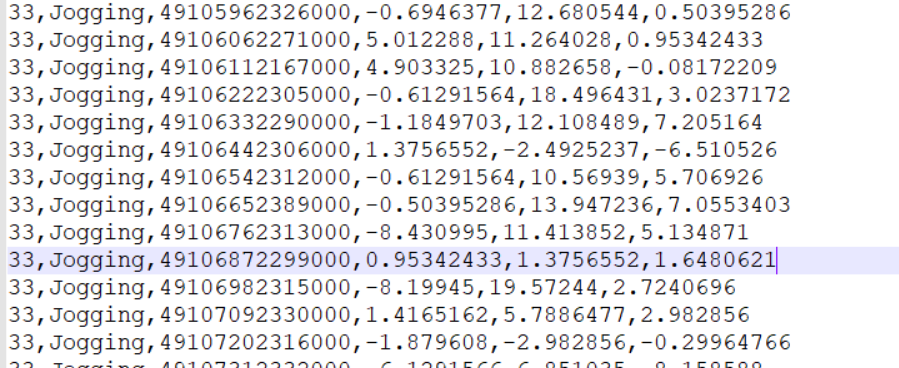
在tensorflow 中使用1D CNN结合加速度数据实现活动识别
本文介绍如何使用1Dcnn 对时间序列的加速度计信号进行处理,并训练和识别出站立,坐,步行,慢跑等动作,使用tensorflow 的环境和python进行开发。 环境: ubuntu p...
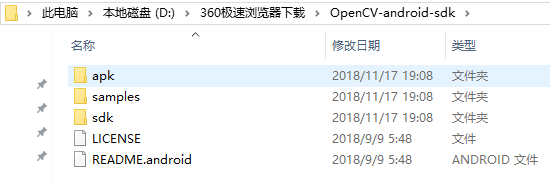
android studio 安装opencv3.2
首先下载 opencv android pack ,下载地址 https://opencv.org/opencv-3-2/ 拉到页面最后找到,Android pack 进入sourcef...

利用图像计算机视觉处理分析大数据的技巧
客观的来说,数据流一般都是单一,抽象的,有能力的人工智能分析系统应该将数据流计算出多维, 并且将把所有的这些多维度的信息紧密的集成在一起。 图像处理和计算机视觉技术能够从多维数据中获取有价值的“信息”并过滤掉一...

轨迹跟踪比例P的实现move2pose
通过对当前航点到目标点的距离比例关系转换成速度。v = kp*s ,距离s越大 v越大,反之越小。随着距离的拉近速度变小为0.导致速度不够平滑。 会有快慢快慢的问题出现。连续点的时候需要进行优化。 目标角度对当...
ROS中的Tracking PID算法
在ROS的源码中给出了Tracking PID的控制算法,该算法可以用来精确的动态的跟踪轨迹。 在 nav_msgs/Path 中可以动态的插入一个目标点,然后进行速度调节,用来达到预期,以此循环这样的多个节点。...
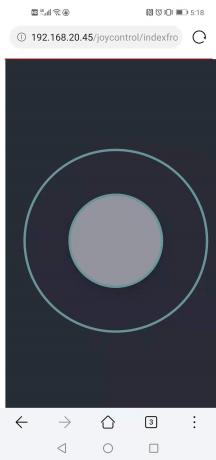
使用摇杆界面控制机器车的行驶
nipplejs 是一开源的虚拟摇杆触摸功能库,可以集成到web的页面中,方便控制机器车行驶。 可以支持的参数有摇杆偏移中心的 力度,距离,角度,上,下,左,右,X,Y的坐标等信息。 由于我们的机器车支持 (v...
opencv根据x和y坐标paint画轨迹trajactory
调用opencv的库可以将x,y坐标直接标记在数组中,然后将数组转换成opencv 的mat图片就可以将轨迹非常快的 画出来非常方便。 #include <iostream> #include &l...
opencv mat数据类型用指针ptr正确表示的方法
opoenCv中的Mat 的数据类型是可以通过指针 以ptr的形式来索引或者遍历的。 第一种方法 cv::Mat image = cv::Mat(400, 600, CV_8UC1); //宽40...
opencv 统计圆内的像素点算法
已知图像中某个圆的的坐标和半径,想统计该圆内的有多少个像素值等于0的点? 圆的的中心为(x0,y0),半径为R. 依据这个圆的方程,,当坐标满足sqrt((x-x0)^2 + (y&nb...

如何根据机器人左右轮的编码计数在图像上画轨迹
根据左右轮子的编码数转换成轨迹,然后在opencv的图片上将轨迹traj描出来。 data.txt部分如下 第3和第4为左右轮子的编码数。 0,0,128,54,105,60,60,469,496 0,0,130,17...
求数组中任意两个数相加的算法
#include <stdio.h> #include <string.h> /** * Note: The returned array must be malloced, assume calle...
二值化图像中统计每列行白点的数量
opencv 统计一列或者一行种某个像素的数量 二值化种统计每列行白点的数量 int nRow = thresh.rows; int nCol = thresh.cols; ...
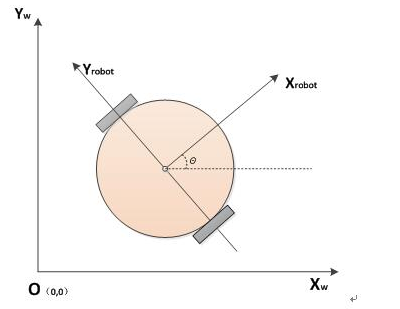
差速两轮车里程计模型基础讲解
二轮差动模型的机器人底盘,是最常见的机器人底盘,像扫地机器人,循迹小车等。作为机器人的移动部件,它需要实现输入输出两大功能。 输入:接收控制指令速度V和角速度W(v,w)--单位m/s rad/s 输出:机器人...

正态分布在占用栅格地图构建的使用
本章介绍如何使用正态分布的概率完成mapping 正态分布的参数定义 正态分布表达式中有两个参数,即期望(均数)μ和标准差σ,σ2为方差。 正态分布具有两个参数μ和σ^2的连续型...