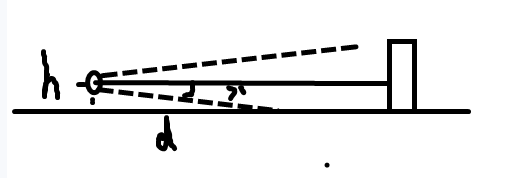
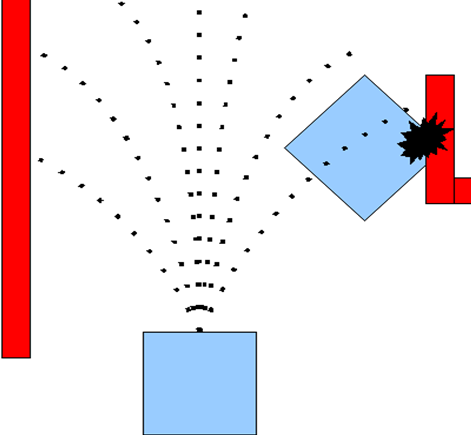
超声波模块hcsr04 固定高度的研究
hcsr04通常作为测距避障模块固定在机器人智能车的车体上。但是固定多高才是最佳的高度呢? 现在对超声波避障模块做以下简单的说明。 一般HCSR04的扫描角度商家给出的为15度,当我们水平放置的时候实际水平角度...
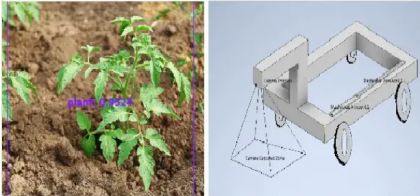
自动除草机器人系统改装制作
机器人车技发网分享一个外国的牛人们创建的一个低功率的,基于FPGA硬件的农业的农业机器人平台,用于从野外检测和清除杂草的项目。 该项目借助机器视觉和神经...
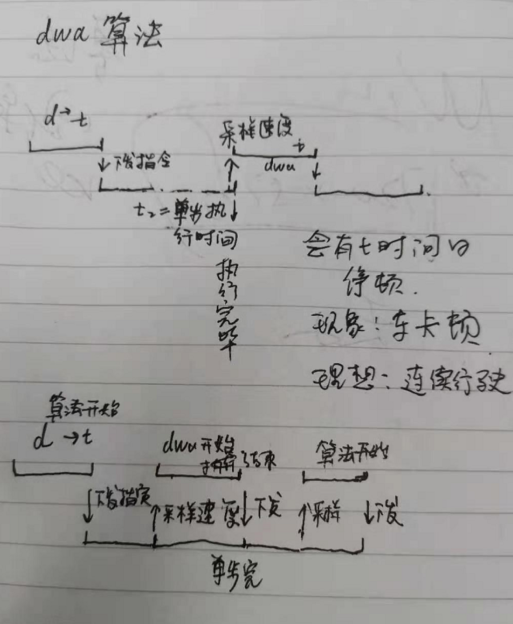
dwa 避障算法的若干理解
前言 根据ros中 base_local_planner 和dwa_local_planner代码的理解。 https://github.com/ros-planning/navigation d...
动态窗口算法运动计划
大多数机器人都有一套用于运动计划的导航算法,这些算法以不同的频率执行,全局路径规划器(例如A *,〜0.1 Hz),中级路径变形(例如弹性带,〜5Hz)以及碰撞/避障算法(〜20Hz),这是执行器控制之前的最后一步。 对于MAGIC 20...
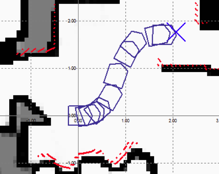
算法学习之DWA局部路径规划算法
DWA算法是近日工作中常用到的算法,在此分享一下。 DWA算法又名动态窗口法,其原理较为简单,属于局部路径规划算法,常用于局部避障. 简单介绍一下算法流程: 根据车体模型不同,DWA...

Rovi is a robot name机器人Rovi智能车Rovi
Rovi is a robot name .Rovi是我们最近打造的一个机器人智能车的名字。就像清洁地球的机器人有个名字叫WALL-E; ROVI 来自rover 和元音字母结尾的结合。是机器人听起来更萌。 ...

印度咖喱做的Chunchunmaru robotcar
看到这个Chunchunmaru 的机器车后,很感慨为啥他这个能做成而我的那个链式轮车还是不行呢? hunchunmaru是基于Arduino UNO的机器人,可以将重物(100kg-200kg)从一...

链条机器人智能车从零开始
在看完这么多的机器人智能车的制作过程后,接下来要放几张笔者业余制作的。比如接下来这个叫 链式机器人智能车,长0.6 宽0.4m 完全是从0一点一点窜起来的,用的都是三角铁,轮椅轮胎,自行车链盘,自行车链条这些市面上常见的器...
使用opencv将图片转换成视频
#include<opencv2/opencv.hpp> #include<opencv2/highgui/highgui.hpp> #include<opencv2/imgproc/imgproc.hpp...

洗脚机器人智能车yuzurobot car
好多年前就在想 万物皆车的概念,只要给物件安上轮胎加上智能控制器就是一个机器人智能车。接下来的这个车是一个改装的洗脚浴盆,这个浴脚盆的改装应该是全网第一人把哈哈。 总之还是归结于自己的女朋友太懒,每天晚上都得给她接水加热,...

机器人智能车局部导航算法move_base(路径规划)
在上一篇的博客中,我们一起学习了ROS定位于导航的总体框架,这一篇我们主要研究其中最重要的move_base包。 &n...
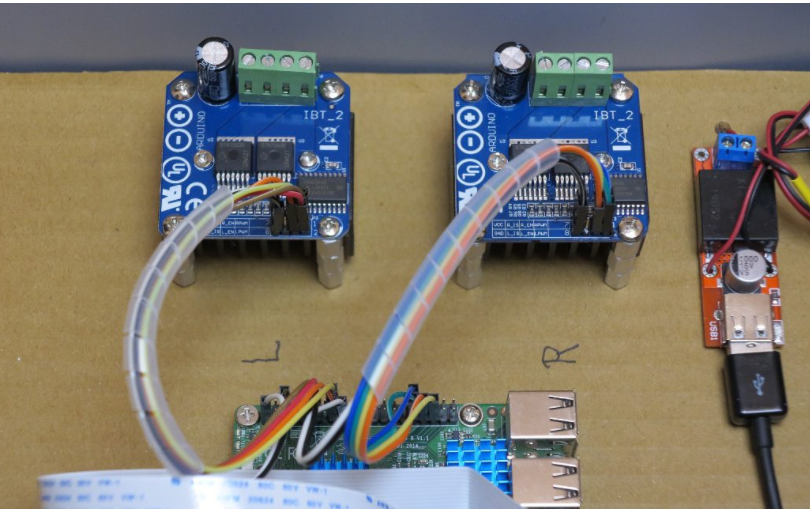
RASPBERRY PI机器人-BIG ROB BTS7960B电动机驱动程序和软件
首先,我搭建了一个2.5 A的小型H桥,为直流电动机供电。但是,这种类型的电机驱动器设计得太小了,一旦机器人要在现场打开,电机驱动器就会烧坏。然后,我买了一个功能更强大的电动机驱动器,现在可以用它驱动并行驶,而电动机驱动器不会烧坏。我...

raspberry Pi big rob机器人- 4×4电动机驱动
本文介绍了我自己制造或购买的Big Rob驱动器的组件。该驱动器描述了安装和驱动车轮所需的所有组件。齿轮马达非常坚固,这也是驱动器本身设计得非常稳定的原因。除了电动机的高扭矩外,机器人的有效载荷还应该足够高,以便能够在机器人上放置一个...
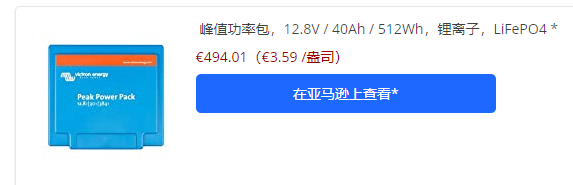
raspberryPi Big rob机器人智能车 锂电池选型
Big Rob是一个总是饿的机器人。您可以从它的嘴里看出它需要很多能量。为了满足他对能量的渴望,我必须找到一个好的解决方案。最后,我决定使用“ Victron Peak Power Pack”。我购买了284 Wh,12V和30Ah的...

raspberryPi Big rob机器人智能车 构建说明
Big Rob是我为越野活动设计的最新机器人。该机器人配备了最新技术,例如使用我构建的差分GPS架构进行精确导航。您可以在此处找到有关差分GPS解决方案的更多信息。大型越野车轮胎使机器人可以在崎terrain的地形中行驶,而不会一直卡死...