
APP反馈提交列表
这里是APP反馈提交的内容
/usr/include/c++/8/cstdlib:75:15: fatal error: stdlib.h: No such file or directory
QT中发现错误 /usr/include/c++/8/cstdlib:75:15: fatal error: stdlib.h: No such file or directory 原因分析: 这是由于gcc7...
qt打开视频播放的方法
在树莓派或者其他Linux 的环境下,发现使用opencv 的 VideoCapture的方法无法打开手机录制的MP4视频。 但是用FFPLAY 是可以正常播放的,重新编译opencv-3-2 将ffmpeg的编...
C语言设备信息的链表,实现增加,删除,修改节点值
链表用来实现存储设备在线信息查询,用于设备的增加删除修改 DevList.c #include <stdio.h> #include "DevList.h" #include...
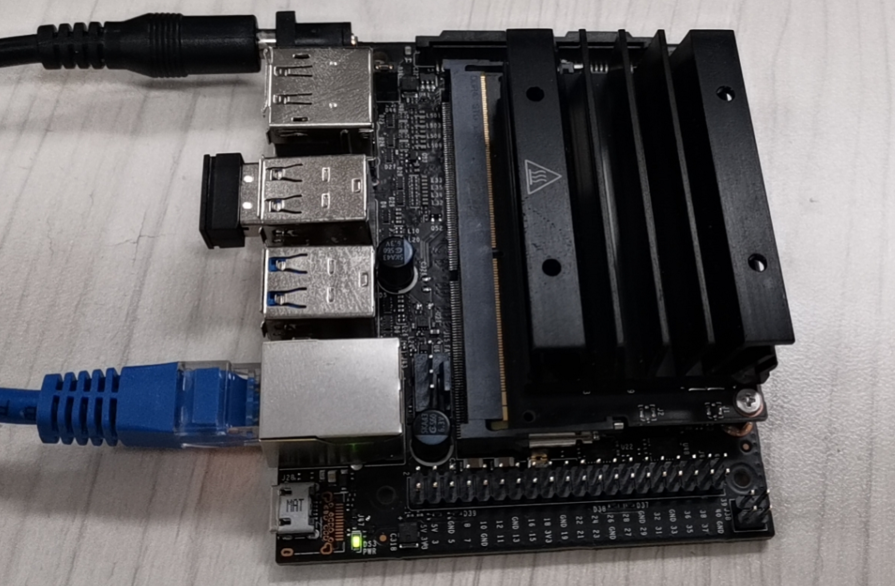
jetson nano 入门笔记
从亚伯智能买的jetson nano,自己备了一张64G的sd卡,打算少些鸭脖智能的64G镜像,发现提示space not enough ,空间有点小。 于是只能烧写16g的镜像。 官网以及鸭脖只能给出的镜像都...
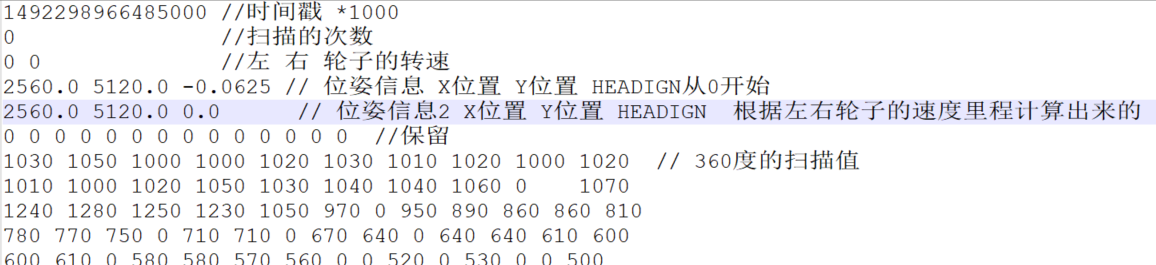
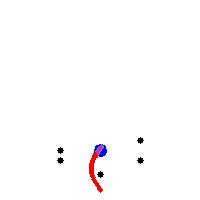
surveyor slam建图中需要的信息参数-breezyslam的应用
在github中找到一个关于slam入门级别建图的学习,这里简单的梳理一下。 chasis 底盘中可以采集传感器的信息,包括BNO055 的imu信息,还有左右两轮子的转速信息。由于DIY这个slam建图的工...

20多种Raspberry Pi计算机视觉教程
20多种Raspberry Pi计算机视觉教程 工程师们一直试图给机器人以视觉上的礼物。因此,他们必须使用计算机,算法,照相机等来复制人类视觉过程。 在DIY领域,Raspberry Pi...
网站插入B站播放视频的代码
<p><iframe src="//player.bilibili.com/player.html?aid=84267566&cid=145147963&page=1" frameborde...

分享国外的农业机器人
农业机器人 本文的最新修改时间为2018年1月14日。 农业或农用机器人是为农业目的而部署的机器人。 在过去的两年中,它们被发布为原型或出售了许多能够执行各种农事的机器人...

依托rovi改装的储纳箱机器人
之前改装过洗脚机器人,最近又看上了储纳箱子,想给他安上一双翅膀让他飞翔。 http://blog.cvosrobot.com/?post=575 不过内置的操作系统都是一样的,正所谓...
dwa区域避障路径规划算法的优化
dwa区域避障路径规划算法一直在不断的优化和测试,最近又在算法中添加了距离目标的成本。在所有的成本消耗计算中,包括和添加了 航向得分 、速度得分 、障碍物距离得分,目标距离得分。程序中将所有的得分都归一化,也就是都...
为甚么GPS要使用kalman滤波
卡尔曼滤波器使您可以滤除噪声并组合不同的测量值以计算答案。它们是一种特别强大的过滤器,并且数学上很优雅。如果没有矩阵数学软件包,它们通常很难计算,简单过滤器的示例以及带有简单矩阵软件包的一般情况都包含在源代码中。鲁道夫·卡尔曼(Rud...
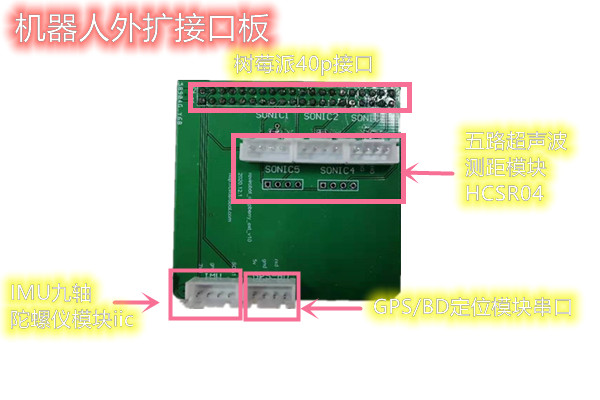
rovi 超声波树莓派外扩模块
专门为机器人的外设做的一块外接小板,集成了超声波接口,可以接5路,一路gps bd定位模块。还有imu九州陀螺仪模块。 能直接插在树莓派的接口上。 ...
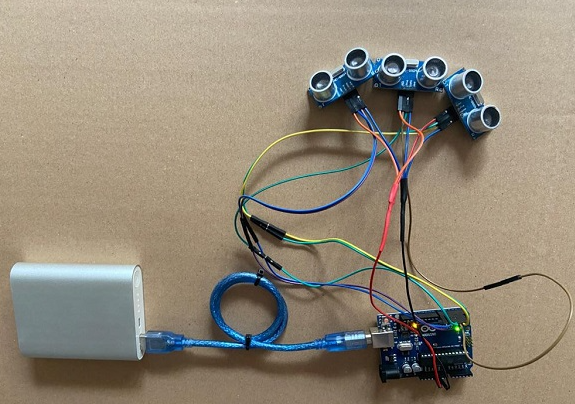
如何构建避障机器人
在本教程中,您将学习如何使用Arduino和三个HC-SR04超声波传感器构建障碍物检测和躲避机器人。该机器人是具有两个驱动轮和一个后脚轮的低成本移动平台。它包括三个传感器,可感知环境中的障碍。 机器人...
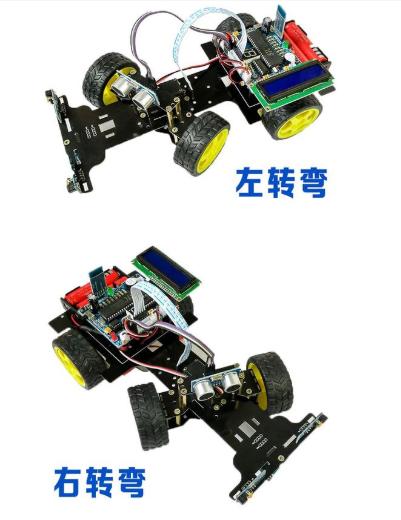
2.2.2 机器人小车独立舵机转向
独立舵机转向是依靠一个舵机实现转向,该舵机安装在两个轮子中间,轮子不需要再安装驱动电机。 &nbs...