
正态分布在占用栅格地图构建的使用
本章介绍如何使用正态分布的概率完成mapping 正态分布的参数定义 正态分布表达式中有两个参数,即期望(均数)μ和标准差σ,σ2为方差。 正态分布具有两个参数μ和σ^2的连续型...

opencv中机器学习svm和贝叶斯的比较自动驾驶识别地头
opencv 3.2 提供贝叶斯的api比较简单,不像svm那么多。贝叶斯只有三行就可以 Ptr<NormalBayesClassifier> nBayes = NormalBayesClassifier::cr...
opencv的hog+svm多分类识别花种类
这是一个细分的识别,打算通过svm和结合HOG特征将五类花卉进行识别,花卉分别是 daisy 小兰花,dandelion 蒲公英 ,roses玫瑰花,sunflowers 向日葵,tulips郁金香。 意在尝试...
opencv的机器学习之SVM和KNn的多分类
之前练习了svm hog分类ministi数字集,效果不是很好,先记录一篇有帮助的文章。 1:KNN最近邻算法 简单理解:从数据集中找到距离当前样本最近的k个样本,投票决定当前样本类别,这里k一般为奇数。不好的地方就是每...
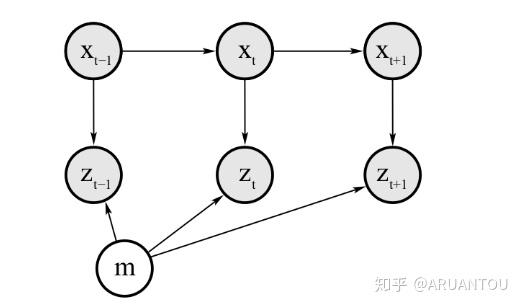
occupancy grid mapping 占用栅格地图构建(三)
占用网格构图算法,主要是根据t时刻的有噪声的测量数据和机器人当前的位姿来生成连续地图。如下: 任何占用栅格建图的黄金法则都是给定数据计算地图的后验概率 我们可以发现,地图的构建就是寻找判断是...

使用opencv c++占用栅格地图的实现(对数几率回归)(二)
上一篇简单简述了python opencv 借助numpy的数据结构运算实现了 占用栅格地图的构建,其中有很多巧妙的设计,今天使用opencv c++进行复现和 移植,在没有numpy的数据结构支撑下使用ope...
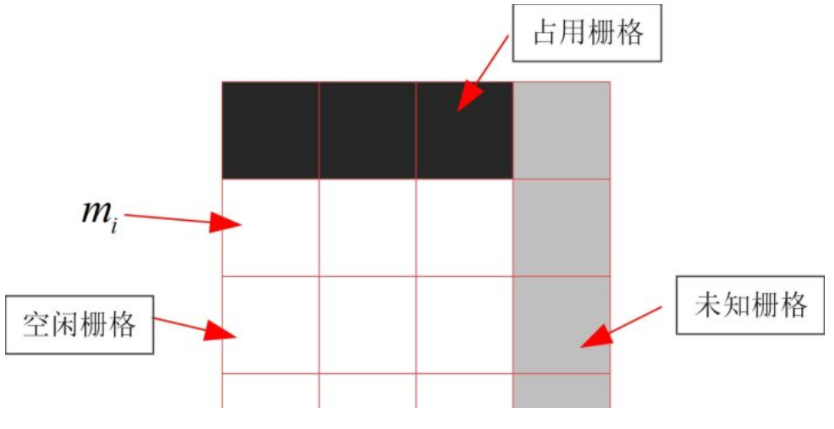
使用python结合opencv占用栅格地图的实现(对数几率回归)(一)
占用栅格地图occupancy grid map 是将一张图片(width * height)用一些单元的小细胞格(cell)来进行拆分,然后可以使用贝叶斯的概率公式进行 “是0非1”的估算,在小细胞格子将概率值(0-1)乘以灰度值2...
关于给初入嵌入式同学的一点点建议和注意
知乎有很多学生私信我也有很多邀请。总结把以前的答案汇聚一起说一下。 前辈你好,我是个普通一本计算机科学与技术专业的大一学生,相比纯粹打代码对能摸摸硬件的嵌入式更感兴趣一点,我的计科专业是没有括号标注嵌入式方向...
opencv的Mat浮点矩阵相加相除运算
直接上代码 int main(int argc ,char *argv[]) { //offline_test_Array(); Mat img2(Map_Size, Map_Size, CV_8UC1, cv::Sc...

opencv blob分析
Blob翻译成中文,是“一滴”,“一抹”,“一团”,“弄脏”,“弄错”的意思。在计算机视觉中的Blob是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域。显然,Blob分析其实就是将图像进行二值化,分割得到前景和背景,然后进行连通区域...

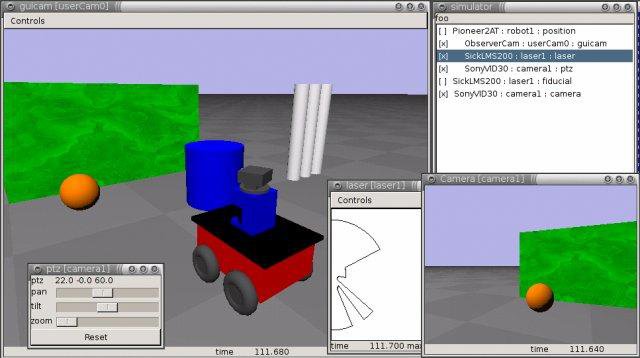
德国弗莱堡大学关于机器人学的在线分享
Albert-Ludwigs-Universität Freiburg (德国弗莱堡大学) 弗莱堡大学(德语:Universität Freiburg),全称为阿尔伯特-路德维希-弗莱堡大学(Albert-Lu...
opencv 二维数组和指针转换成mat的方法比较
opencv 二维数组转换成mat 二维数组以array方式存在 可以直接使用memcpy进行拷贝,因为内存连续。 如果存储数据的是指针。则用下边方式: 二维指针转换成mat ...
范数的简单测试
范数通常用来求解一个向量的长度,也可以求一个向量的距离。python下求解L2的范数为 numpy.linalg.norm([x,y]) 示例如下 lid@lid-VirtualBox:~/shar...

opencv 透视变换
什么是透视变换: 1、透视变换(Perspective Transformation)是将图片投影到一个新的视平面(Viewing Plane),也称作投影映射(Projective Mapping)。 照片有...

jetson nano 跑yolo4-tiny USB摄像头只有2fps
上一篇介绍了如何入门jetson nano 这里又调用了USB摄像头进行实时检测,使用 cfg下的coco 和 yolo4-tiny.weights 插入USB 摄像头后,会弹出 /dev/vid...