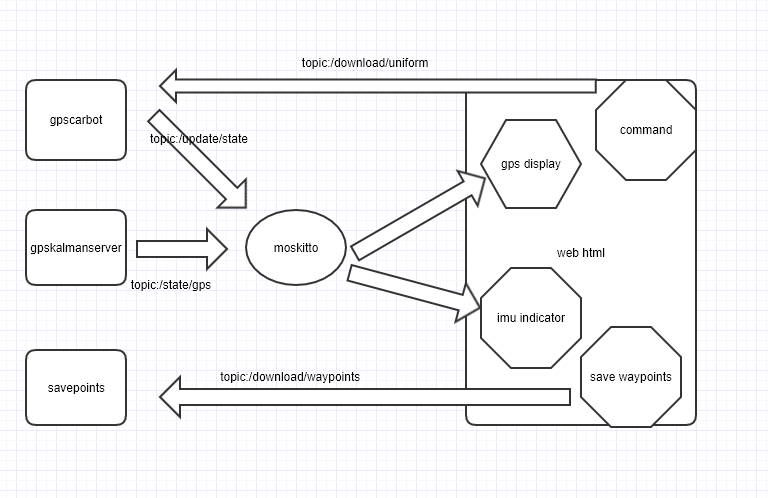
12-GPS室外定位导航车topic 浏览图
这张图比较全面的说明了topic之间的订阅与发布信息,借助ros的设计概念。 topic /download/uniform /update/state /state/gps /do...
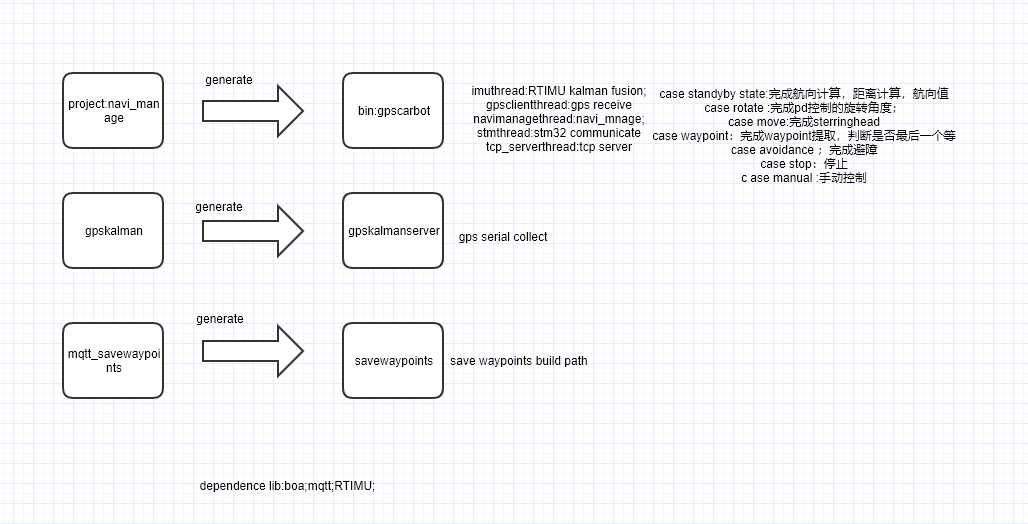
11-GPS室外定位导航车进程线程关系表
这里还是看扎张图 以方便理解

10-GPS室外定位导航车树莓派navi开发
case standyby state:完成航向计算,距离计算,航向值 case rotate :完成pd控制的旋转角度; case move:完成sterringhead case waypoint:完成waypoint提取,判断是否最后...
9-GPS室外定位导航车树莓派卡尔曼滤波程序开发
程序为独立的进程,工程名为 GPS_KALMAN ,没有融合IMU.(下一步将会融合imu )提高定位精度。 生成的二进制可执行文件为 gpscarbotserver 通过gps/state 发布到...
8-GPS室外定位导航车树莓派waypoint接收程序开发
这里使用mqtt 接收cjson 键值对,然后保存为文本。 该程序为独立进程,工程名为 mqtt_waypoints 生成的可执行文件为 waypoints waypoints.data 会被覆盖,不会累加 。 路径在...

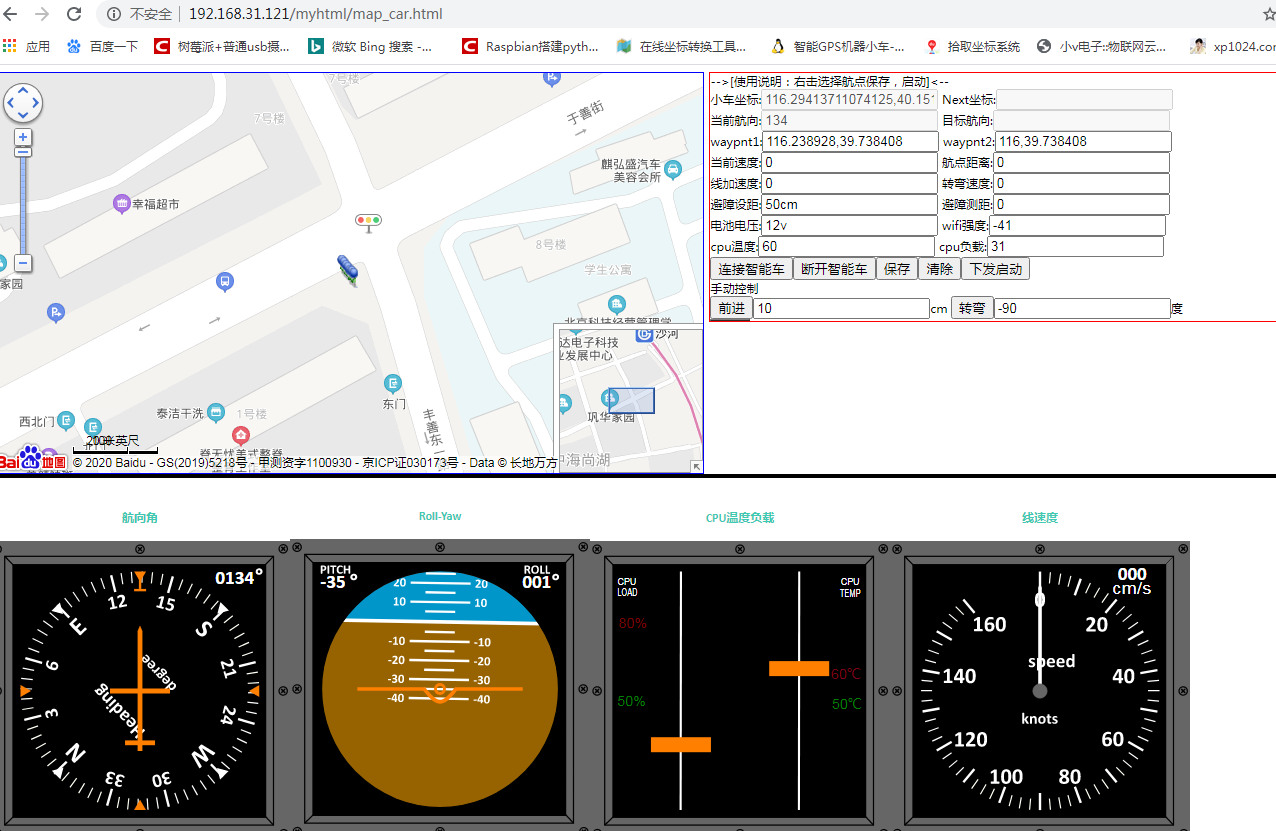
7-GPS室外定位导航车规划航点waypoint 和下发
请务必将智能车放到室外或者gps 信号比较好的能够定位的情况下再操作。 能够定位之后,断开智能车,鼠标右键单击5个航电waypoints 如果出错可以清空重新规划, 规划完成后,单击保存既可以下发到车辆中。 ...
6-GPS室外定位导航车仪器指示表显示
这里使用的开源方案 为 flight-indicator . github为 https://github.com/horo2016/jean-flight-indicator 提供支持航...
5-GPS室外定位导航车的web mqtt完成通信
这里给出的方案是使用paho_mqtt.js 和mqttws31.js 实现。 html中调用标准库 api 接口实现 。通信使用 cJson 格式 键值对 。 例如 lonti:112...
4-GPS室外定位导航车BOA服务器搭建百度地图和必应地图
地图调用的方案国内选择的是百度,也可以用高德。国外选用的时必应地图。必应地图有点大,打开的时候反应很慢,这里的教程 只是嵌入到了树莓派中,实际中用的还是百度地图。读者如果感兴趣可以在必应地图中进行开发。 必应地...
3-GPS室外定位导航车和底盘通信接口
单片机往外发送的接口 在rosNodeNom.c void dataPackSend(void) { com_x_send_data.x_pos.fv = p...
2-GPS室外定位导航车定位车树莓派环境搭建
如果你想重新搭建环境,从一张空白的sd卡开始的话,您将这样做。 第一步 下载树莓派最新镜像 strech image。使用树莓派3B 说明; 第二步 使用win32diskimager 将系统ima...

1-GPS室外定位导航车定位车底盘开发
有关地盘开发的相关可以先看这两篇了解 用最低成本搭建小车底盘stm32 &nb...
 置顶推荐
置顶推荐 GPS定位导航室外定位导航车开发说明教程,想去哪里点哪里!
最近会更新如下教程,欢迎跟进。智能小车 GPS导航车,gps定位导航车 &nb...
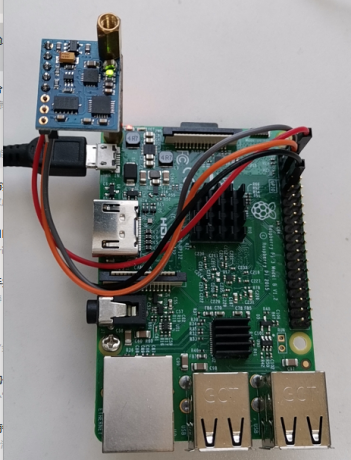
RTIMULIB库在树莓派上的使用
RTIMULib2是一种将9自由度、10自由度或11自由度IMU连接到嵌入式Linux系统并获取RTQF或Kalman滤波四元数或Euler角位姿数据的简单方法。基本上,集成RTIMULib2只需要两个简单的函数调用(IMUInit()...
usb camera yuyv(yuv422)转换成yuv420
/* * V4L2 video capture example * * This program can be used and distributed without restrictions. */ #incl...